あそぼ~ど ロボットカーの作り方 (同人ハードウエアフェス2019版)
2019/02/12あそぼ~どに搭載された機能を評価できるようなロボットカー部品キットを同人ハードウエアフェス2019にて頒布しました。
部品リスト
あそぼ~ど、Lipo充電池、ちびギアモーター2個、タイヤ2個、ちびキャスター、木片、ねじ(1.7x6mm4個、2×8mm2個)、ジャンパー配線4本
頒布したセットで不足品がありましたら、メールにてお知らせください
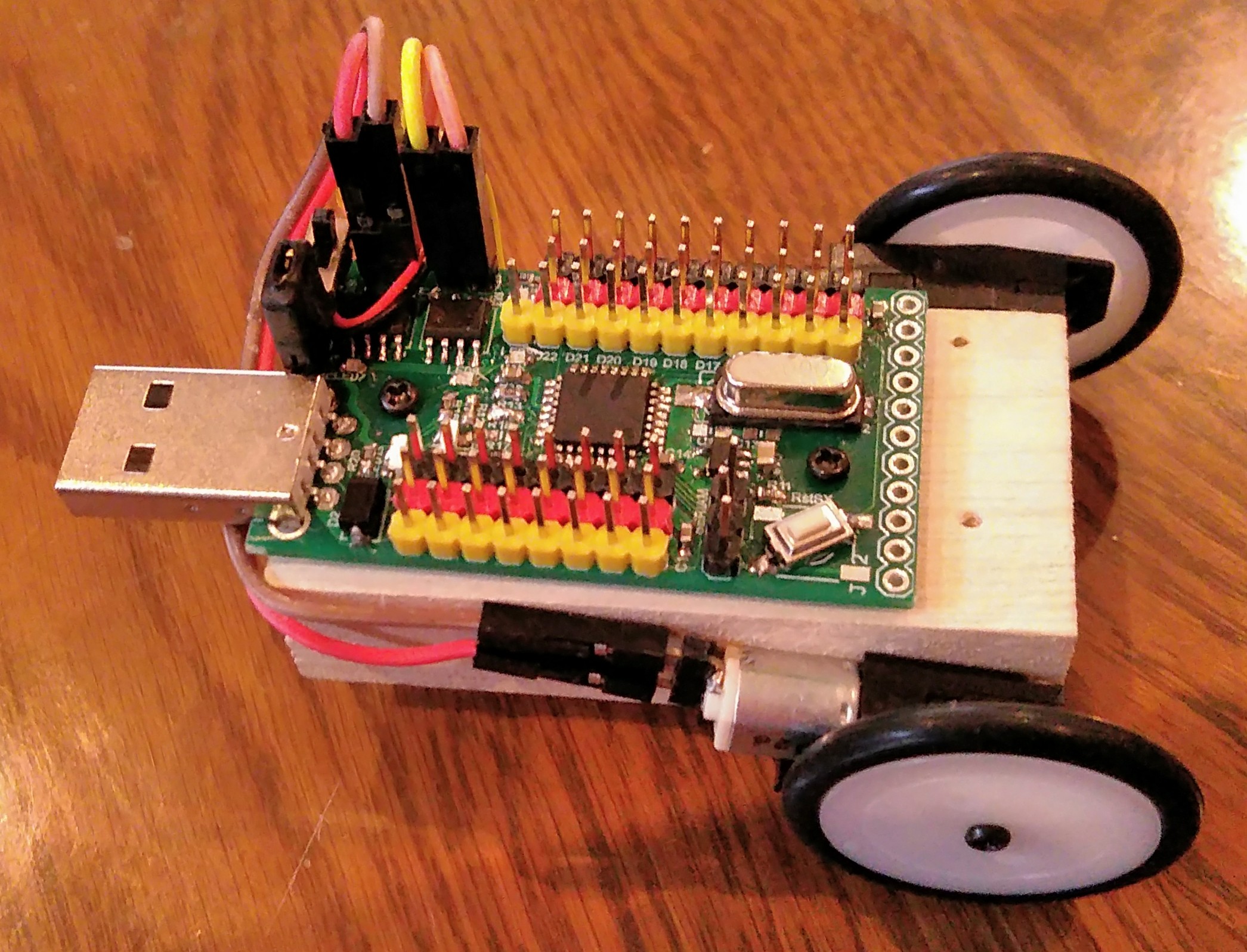
作り方
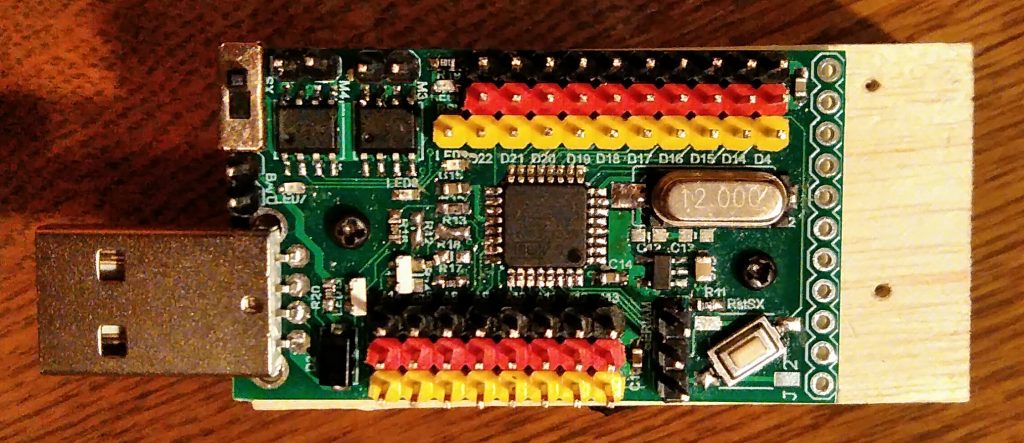
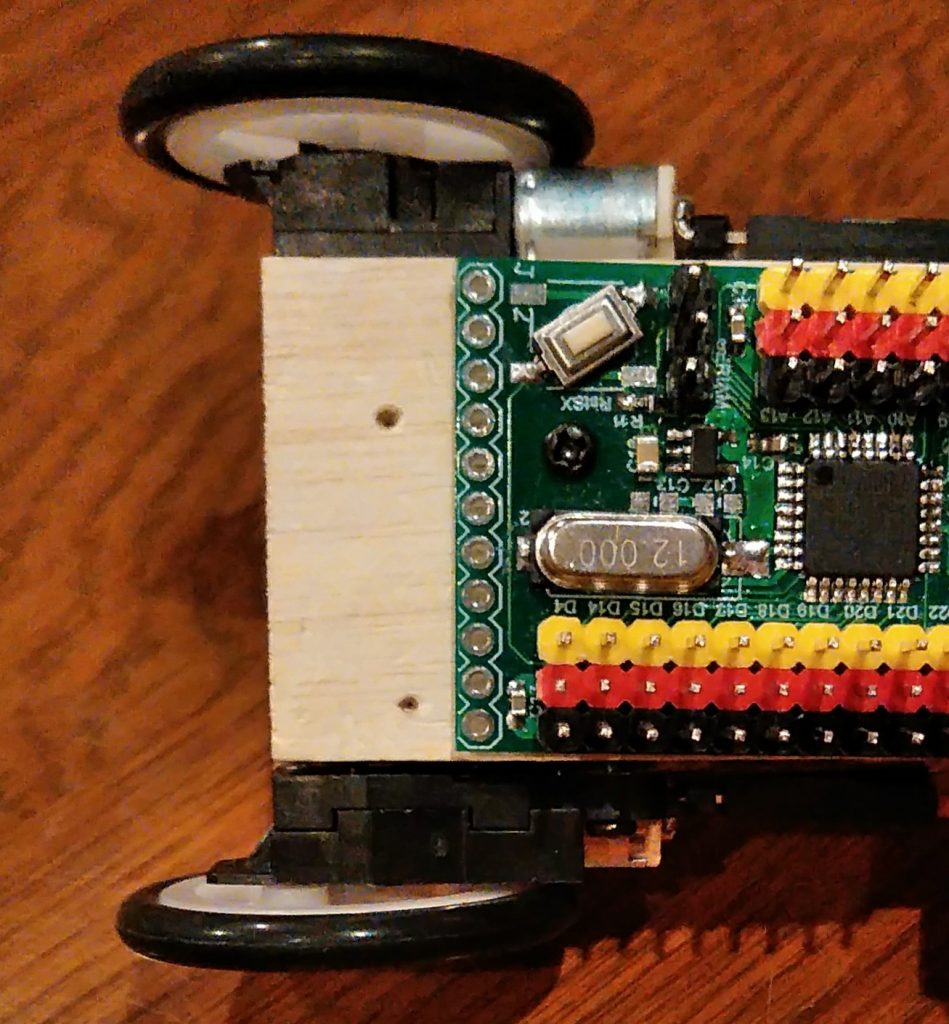
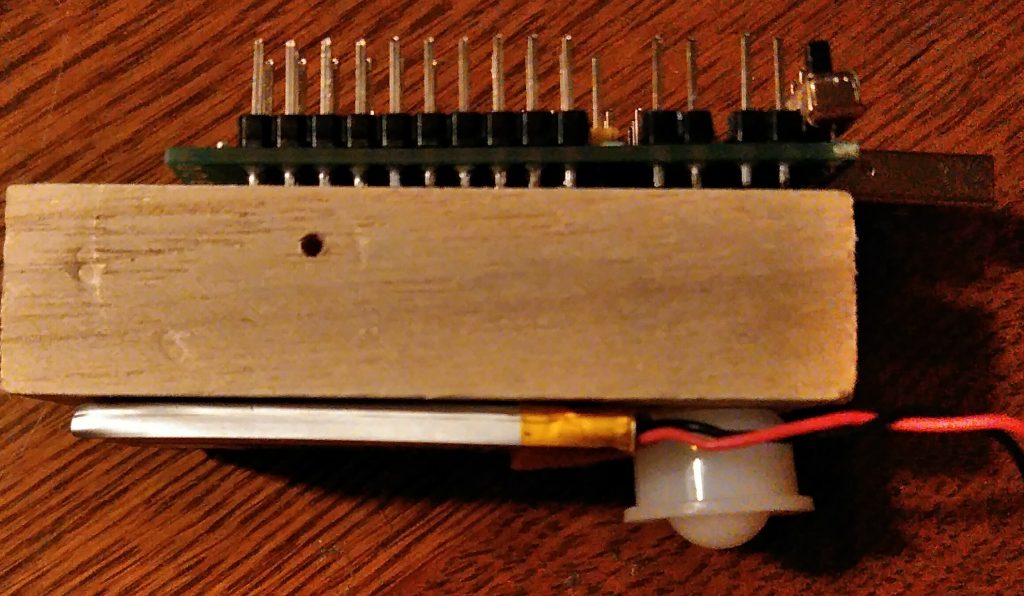
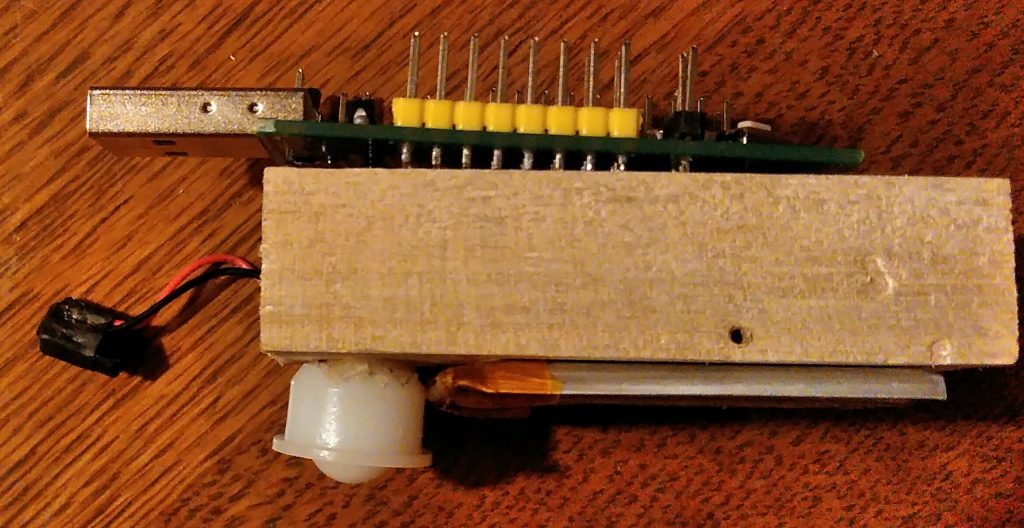
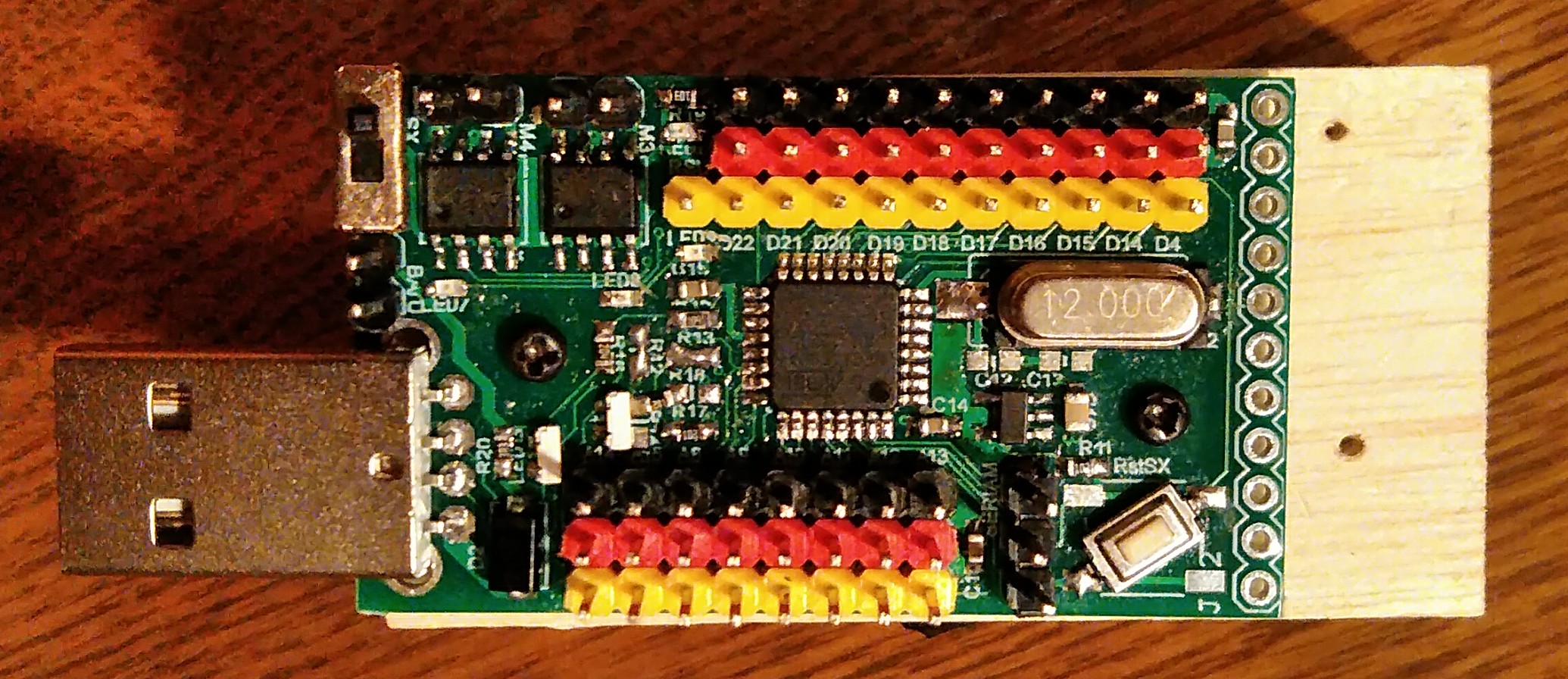
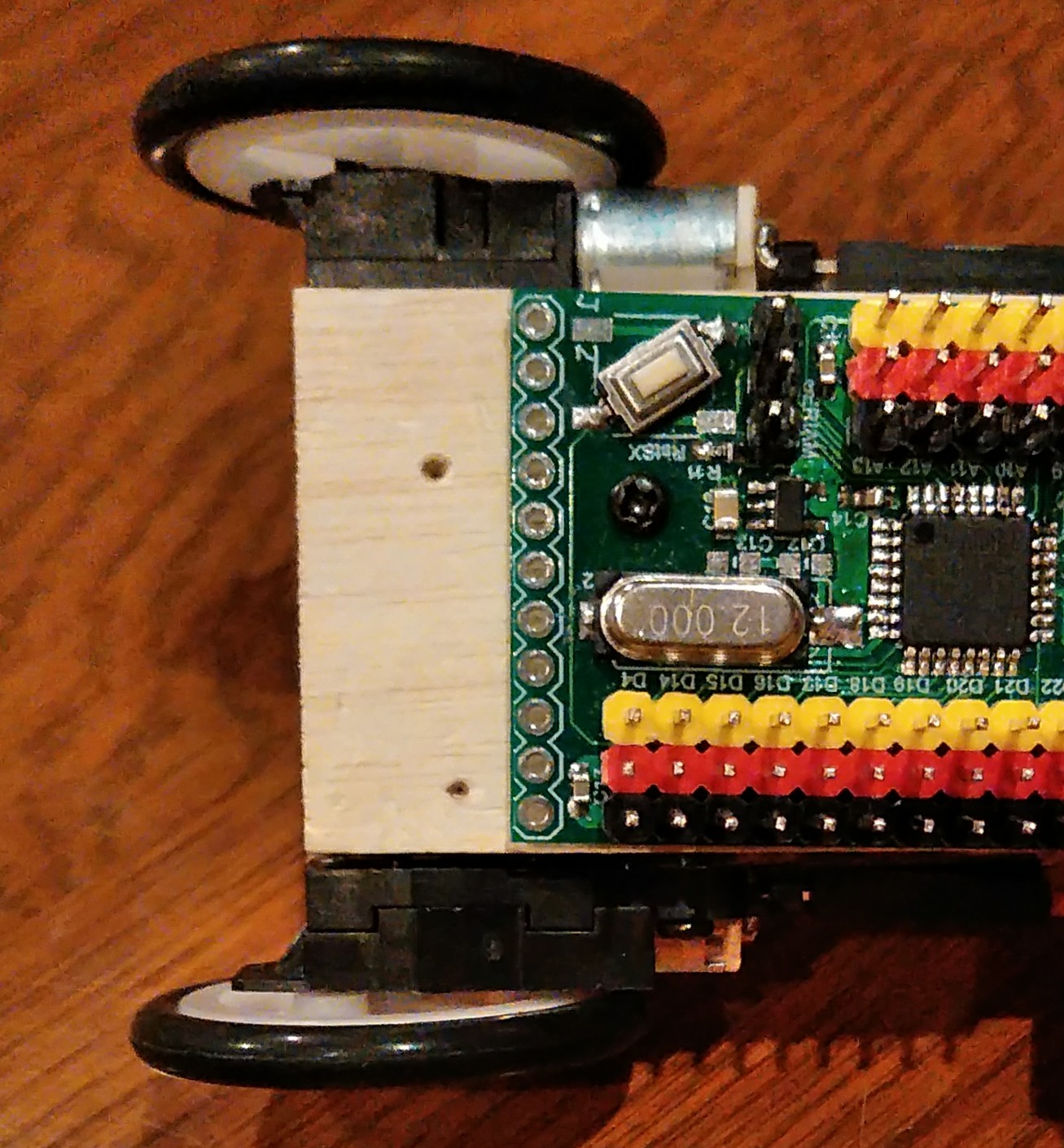
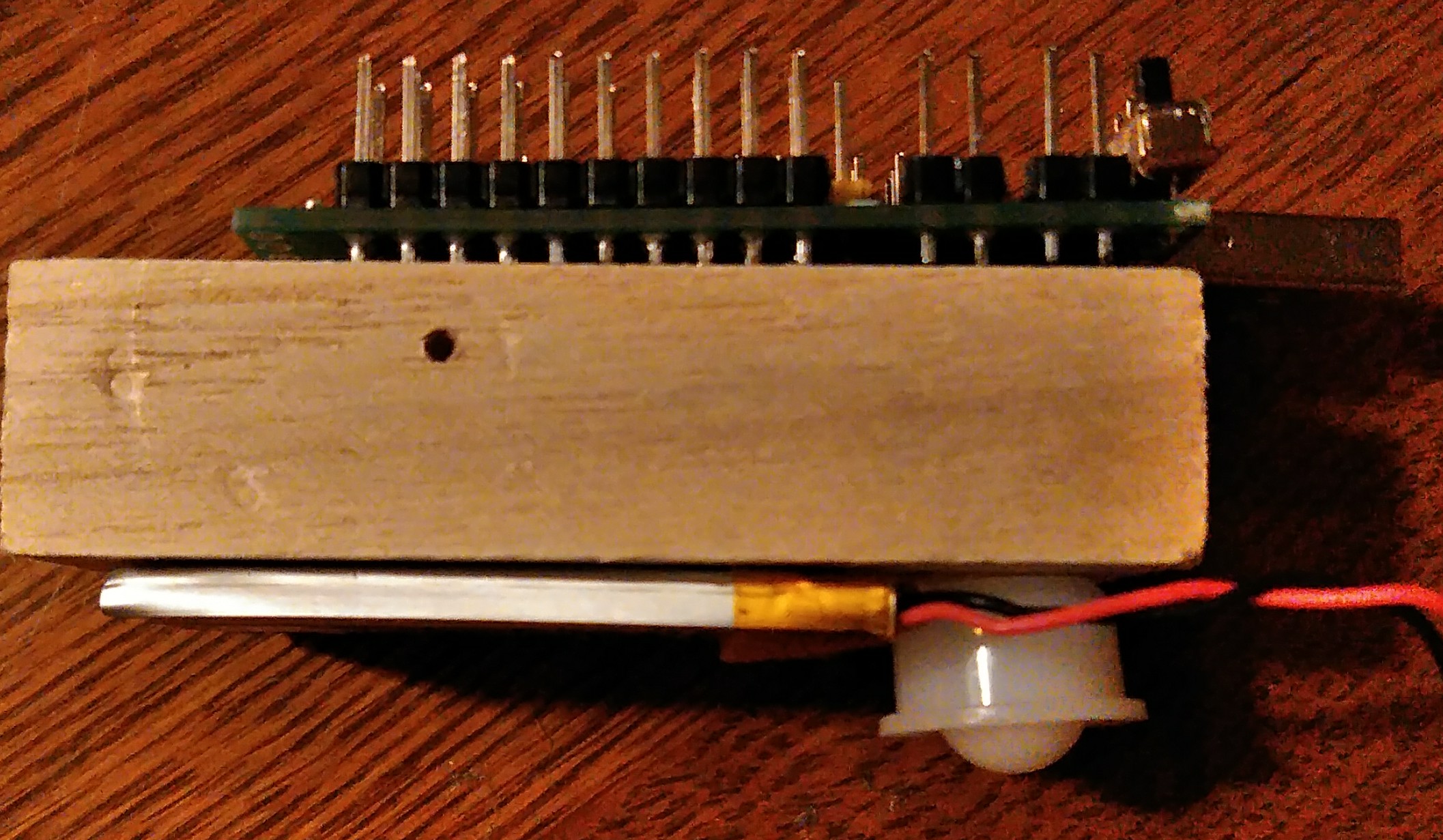
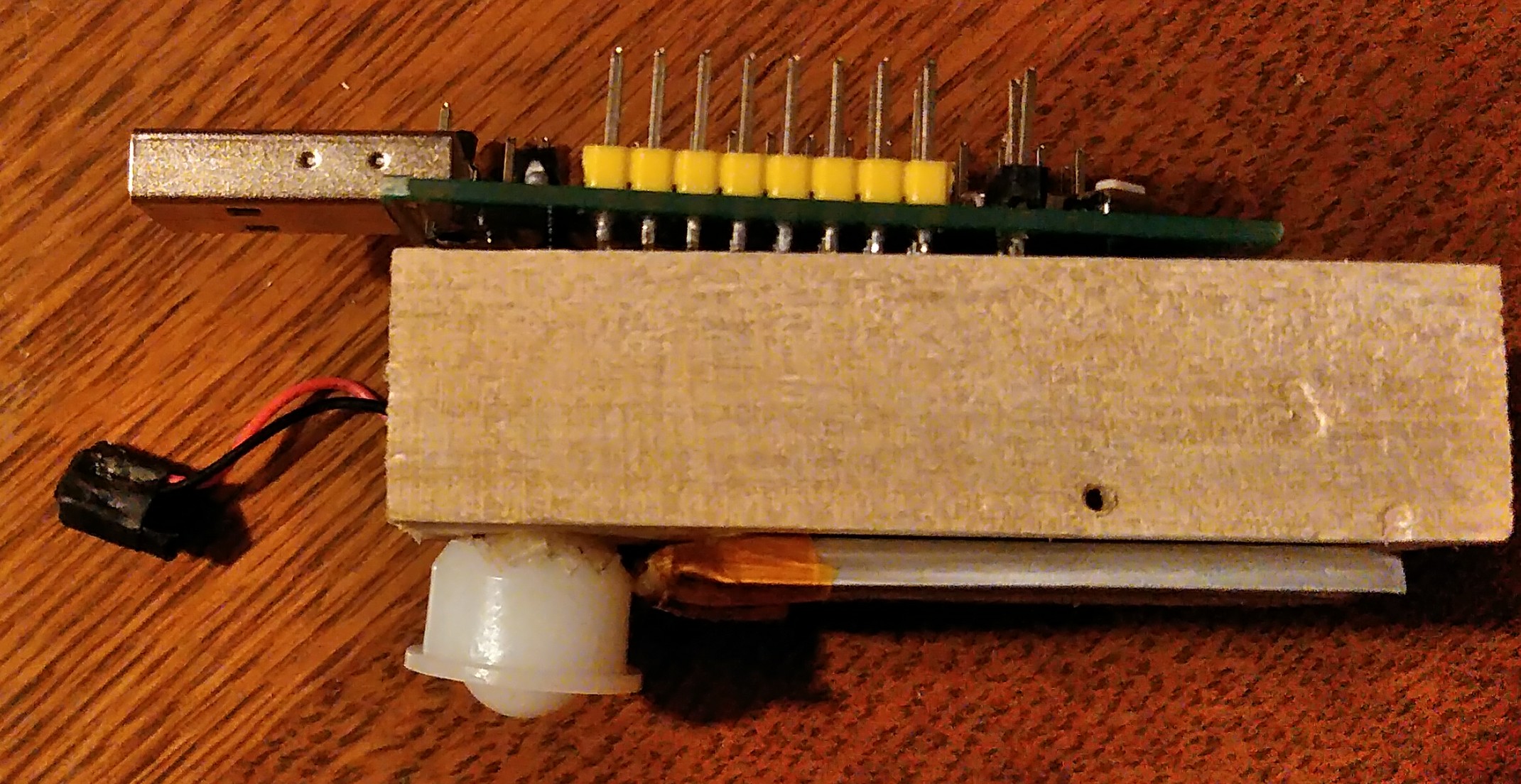
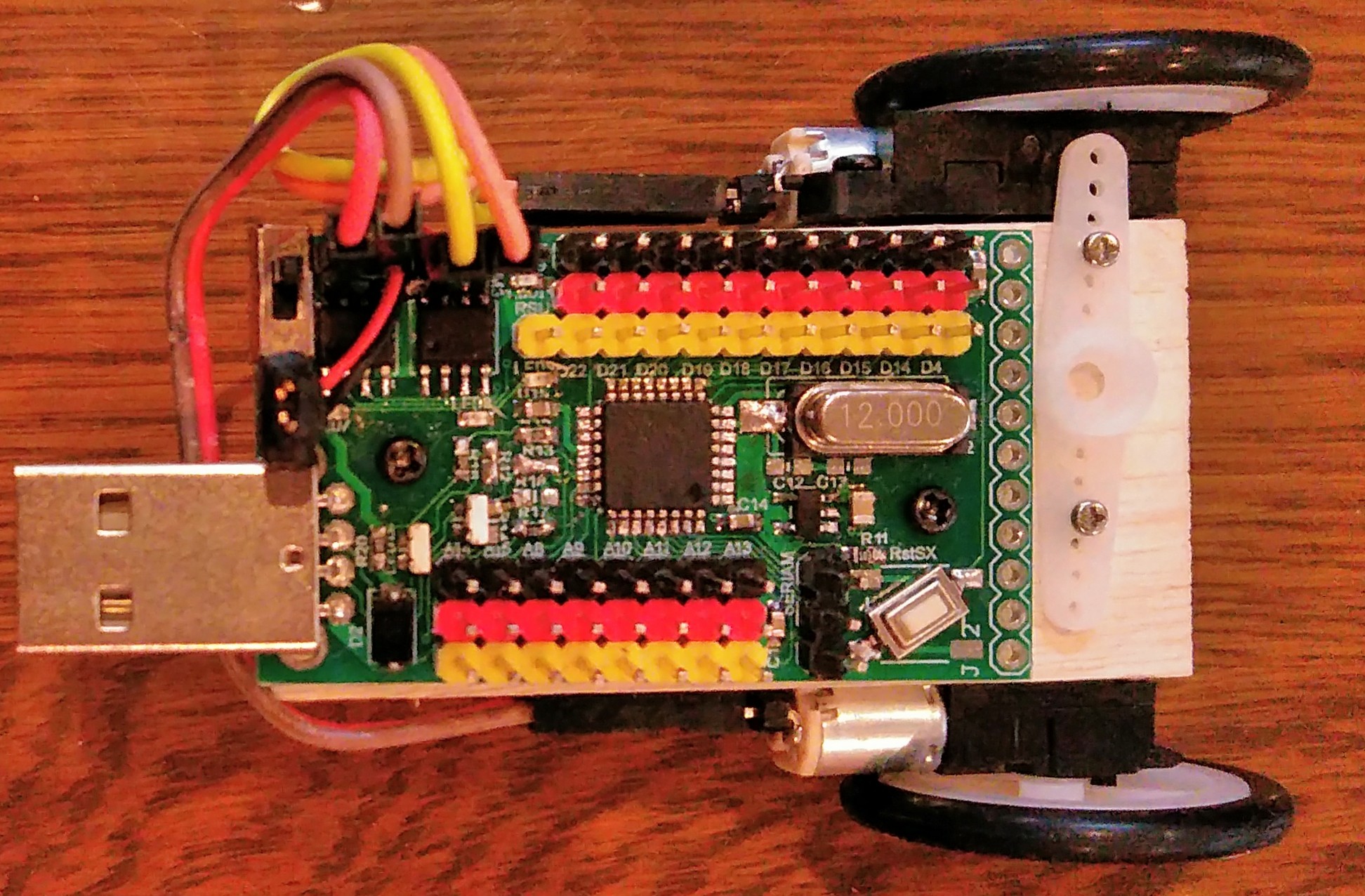
- あそぼ~どを木片に黒ねじ止め(1.7x6mm2個) USBコネクタ側の基板と木片端を合わせます。
 –
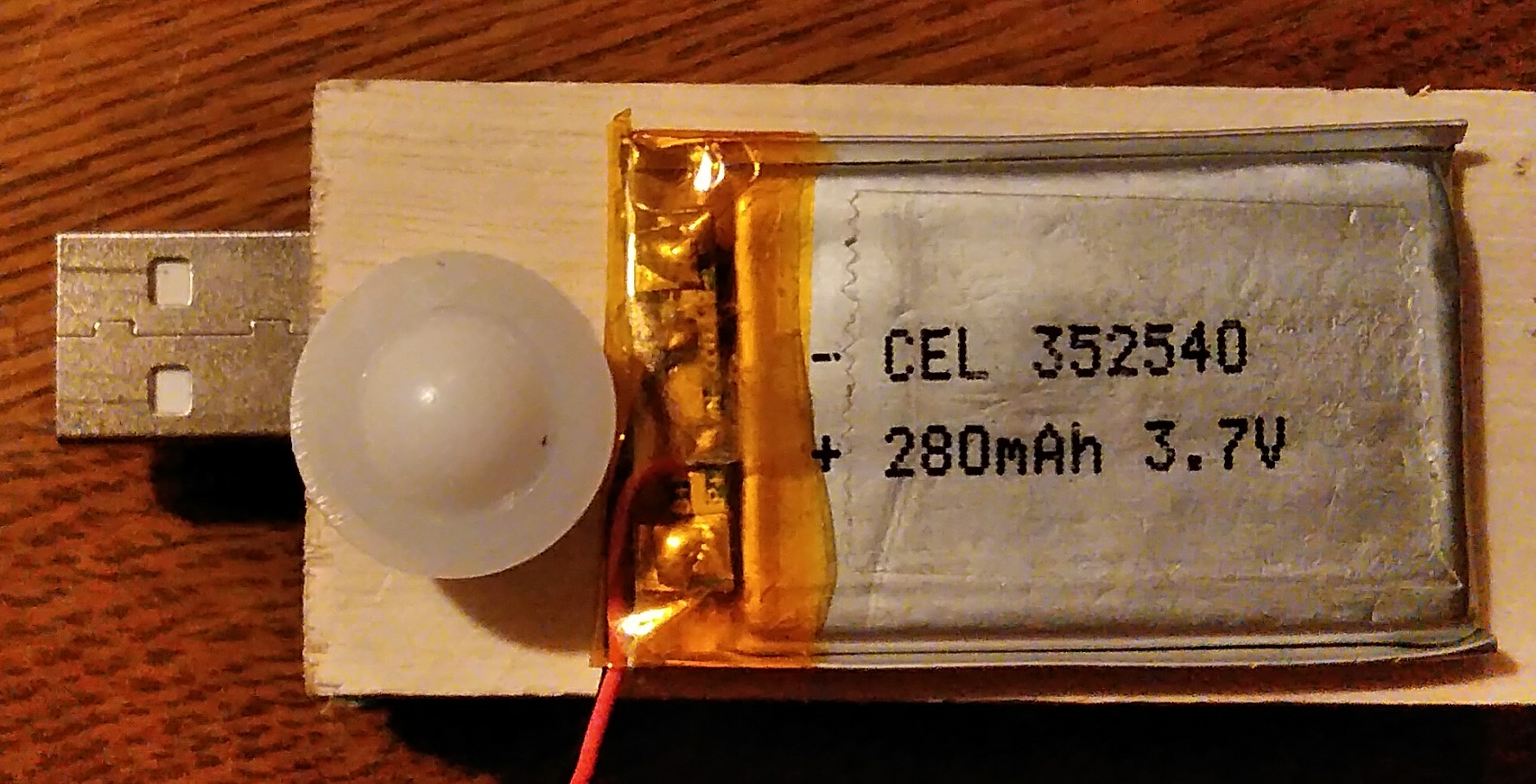
– - Lipo充電池、ちびキャスターを木片に両面テープで貼り付けます。
 –
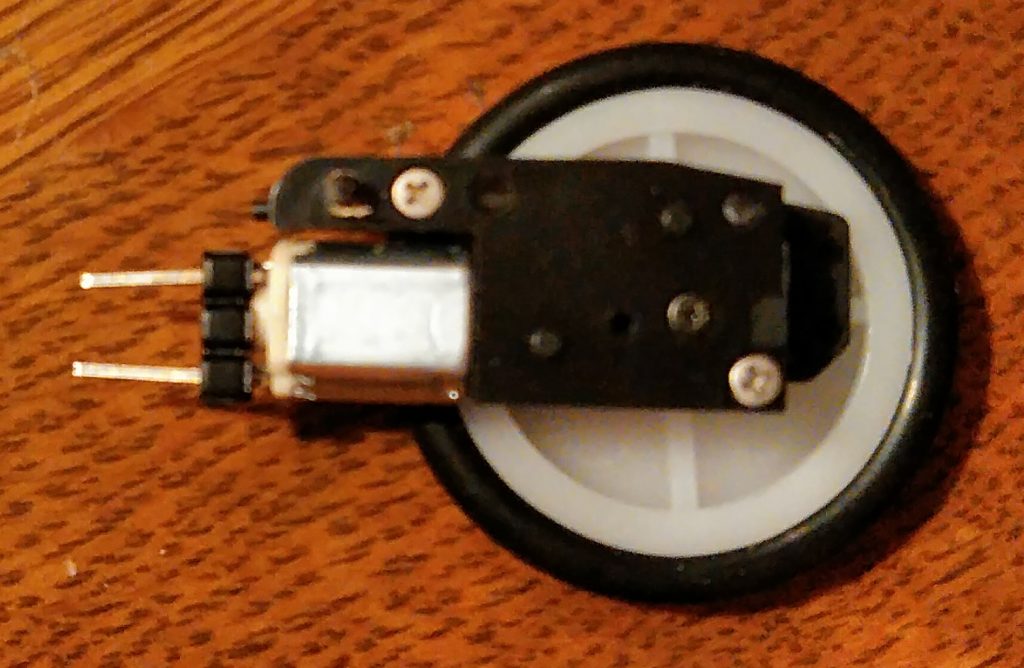
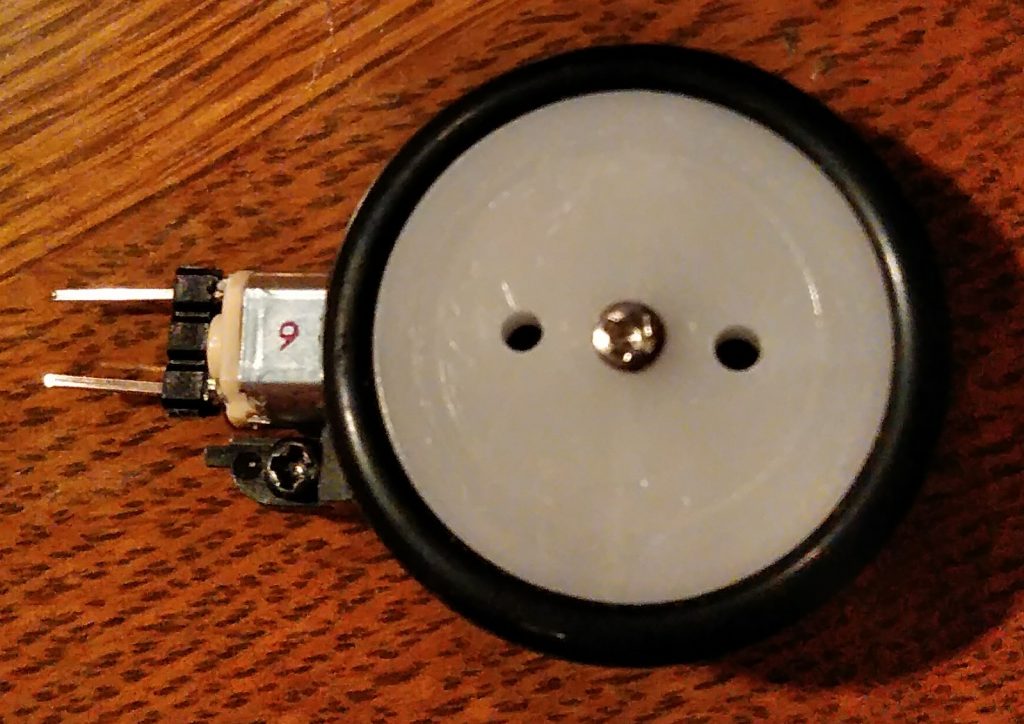
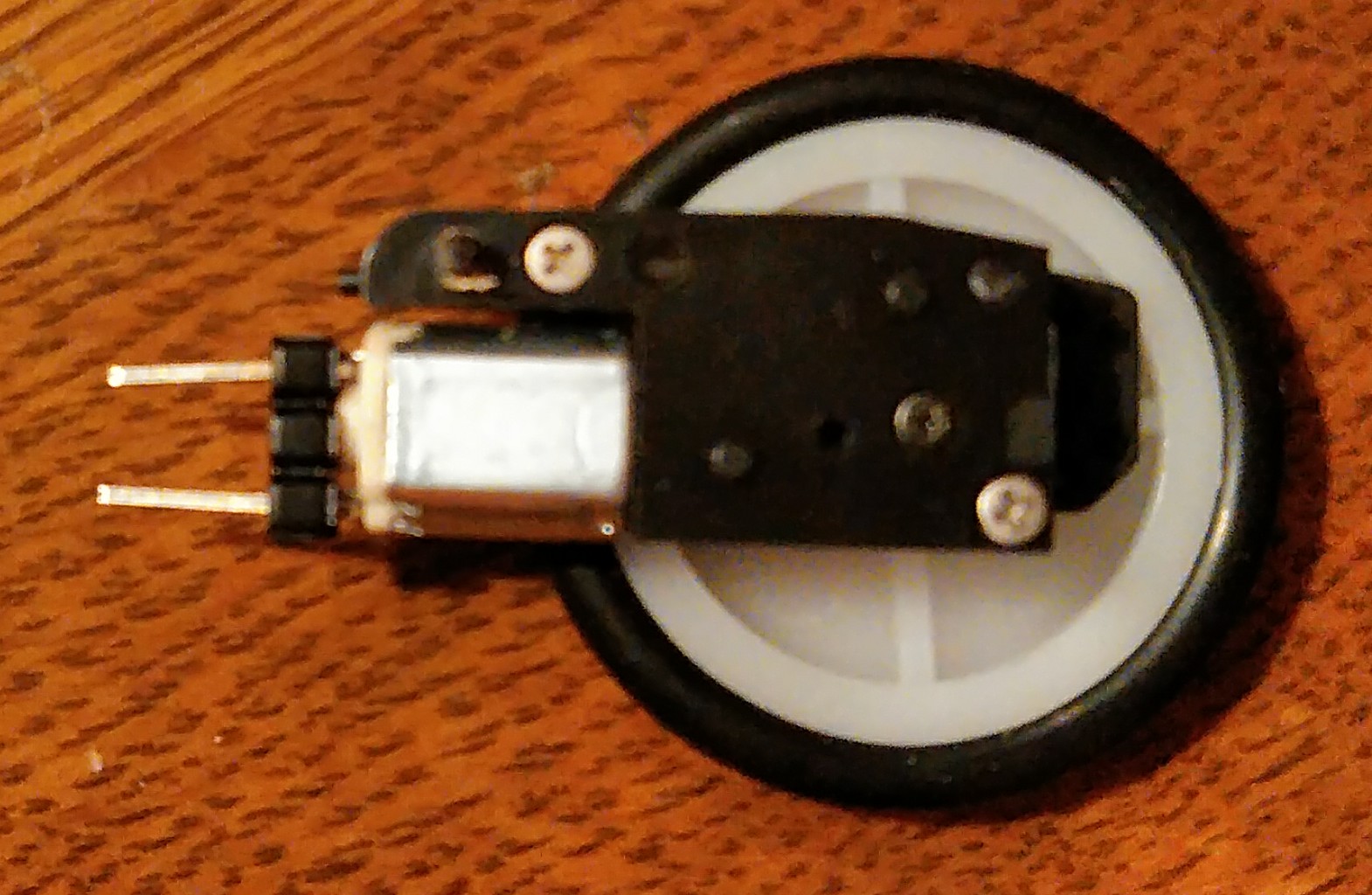
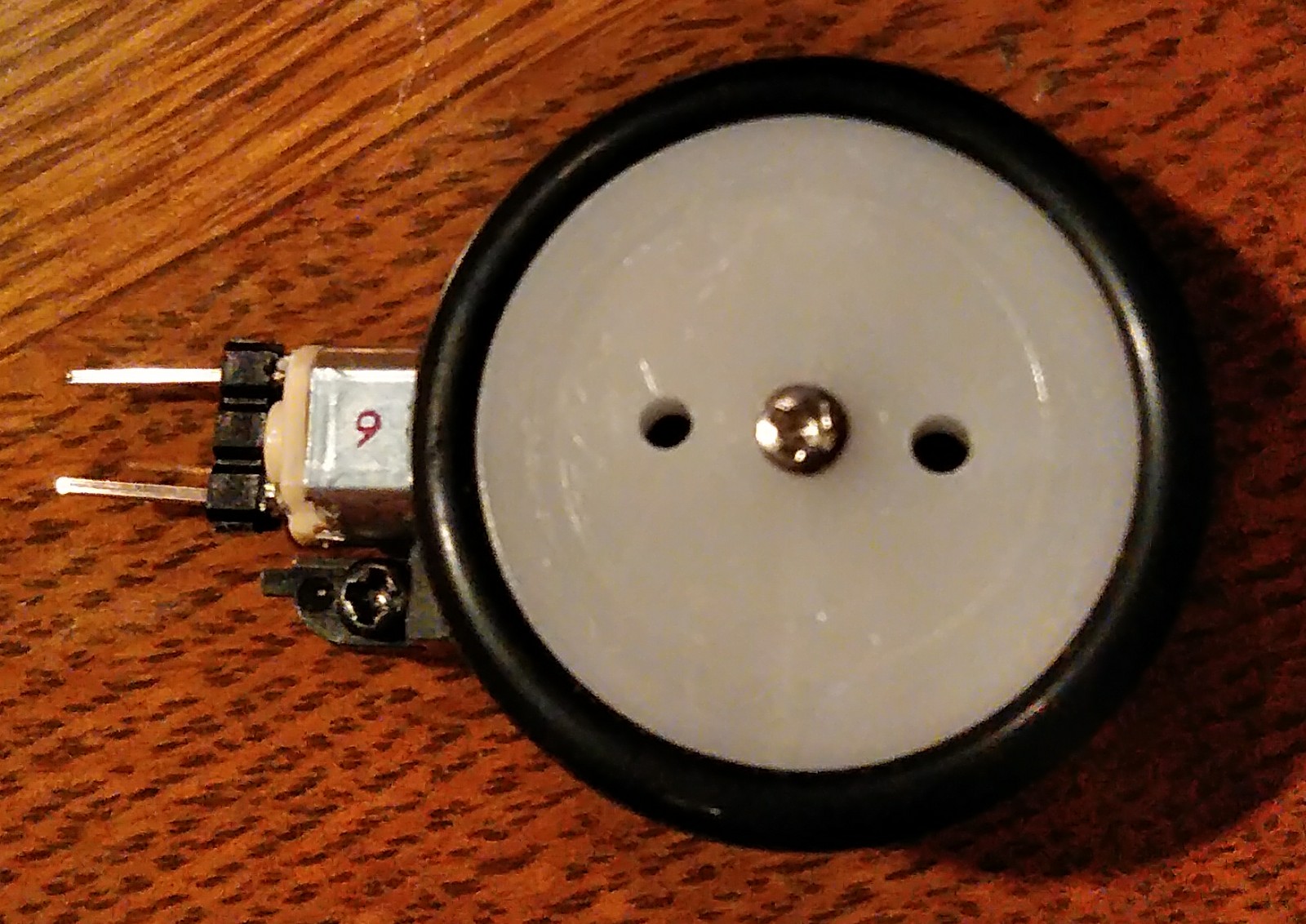
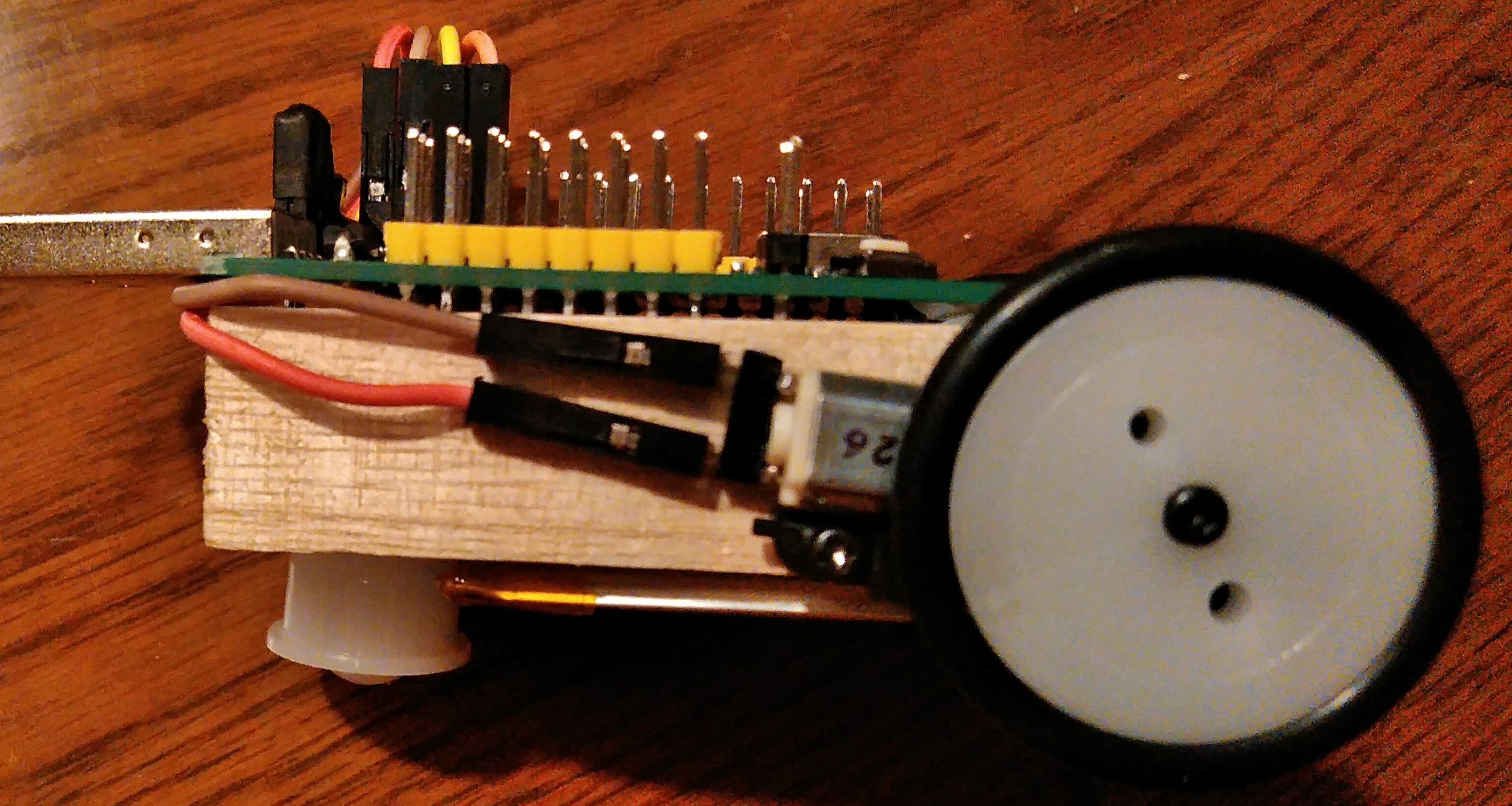
– - ちびギアモーターにタイヤをビス止め(2×8mm)このリンクの組立て方を見ながら、ちびギアモーターに車輪をねじ止めします。
 –
– - ちびギアモーターを木片に黒ねじ止め(1.7x6mm2個) タイヤの高さをキャスターに合わせ、ギアモータと木片の端を合わせます。両面テープ併用でずれにくくなります。
 –
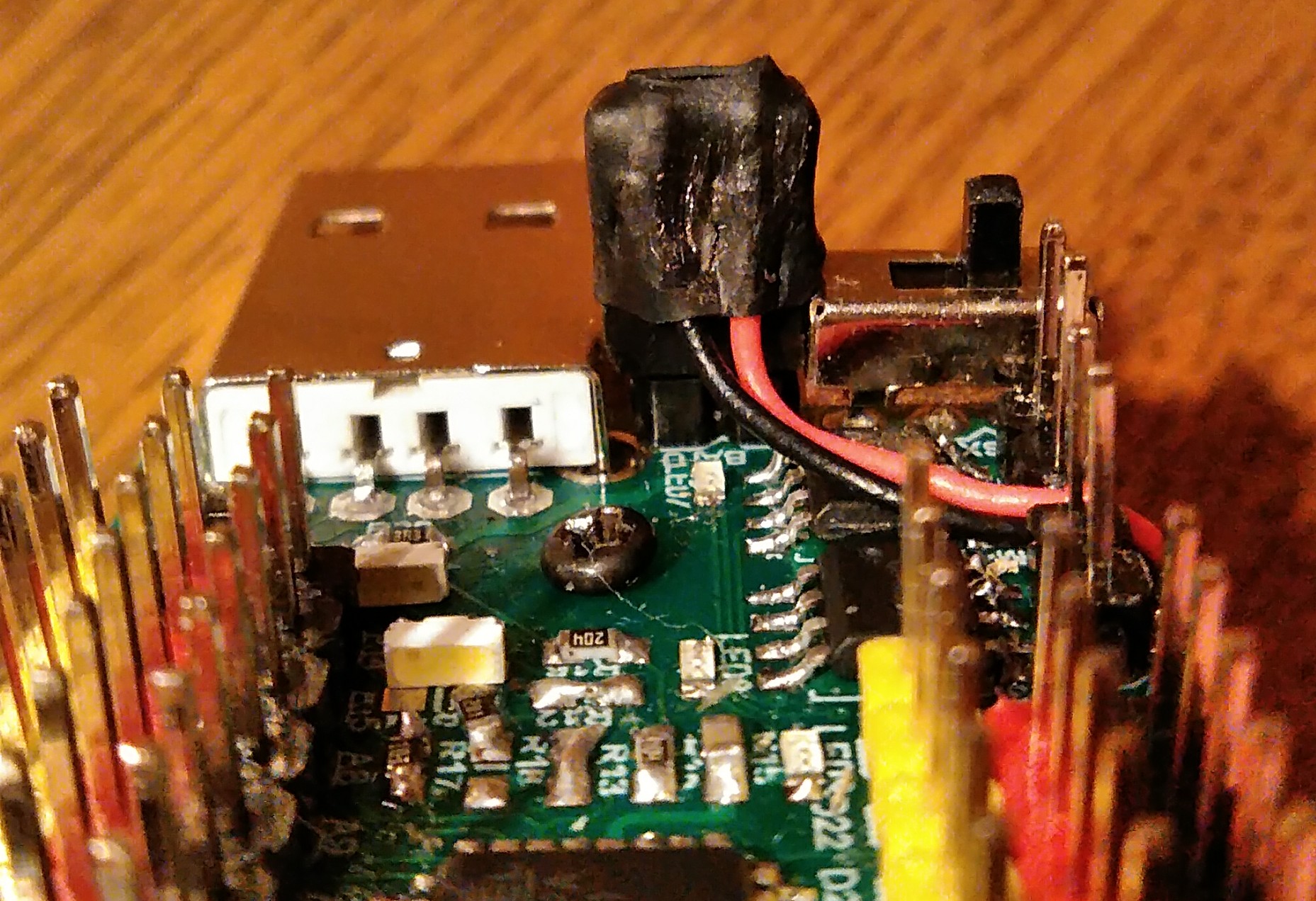
– - Lipo充電池の配線 USB端子側が0V(黒線)
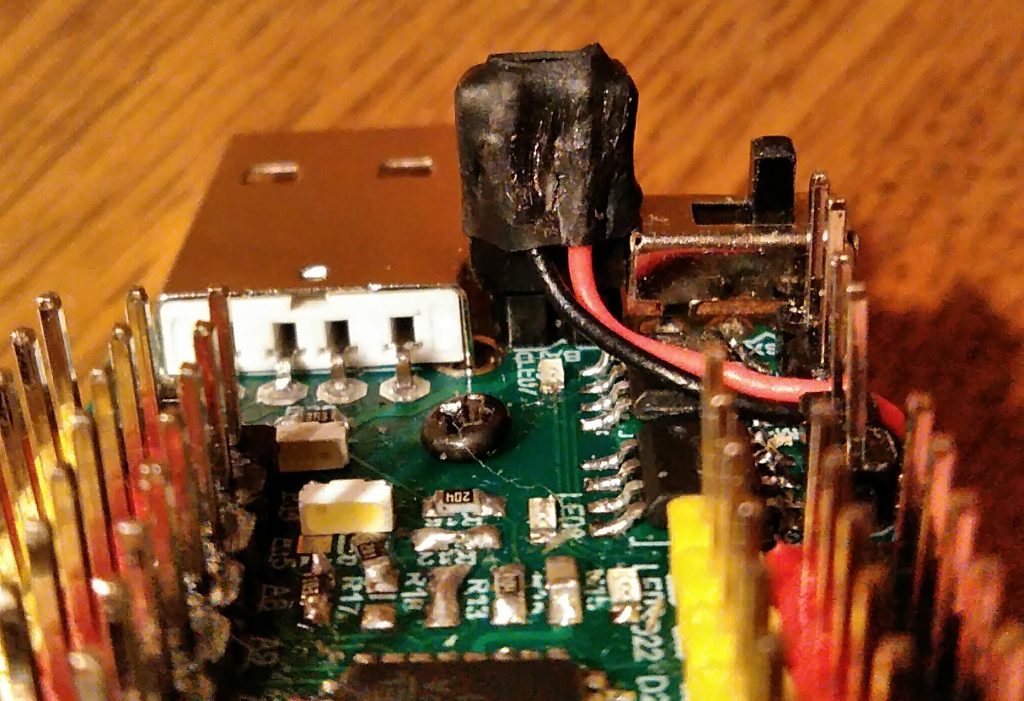 –
– - ギアモーター配線
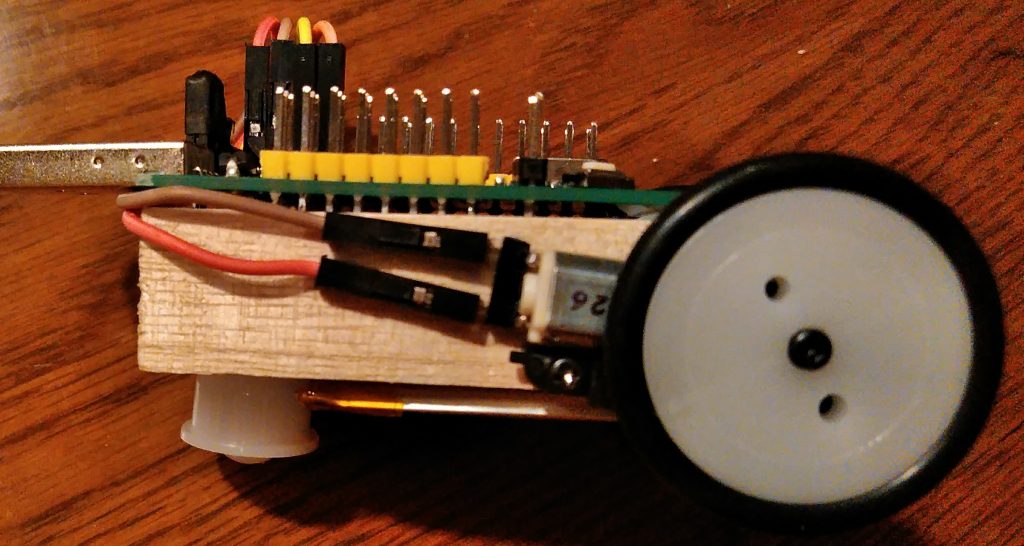
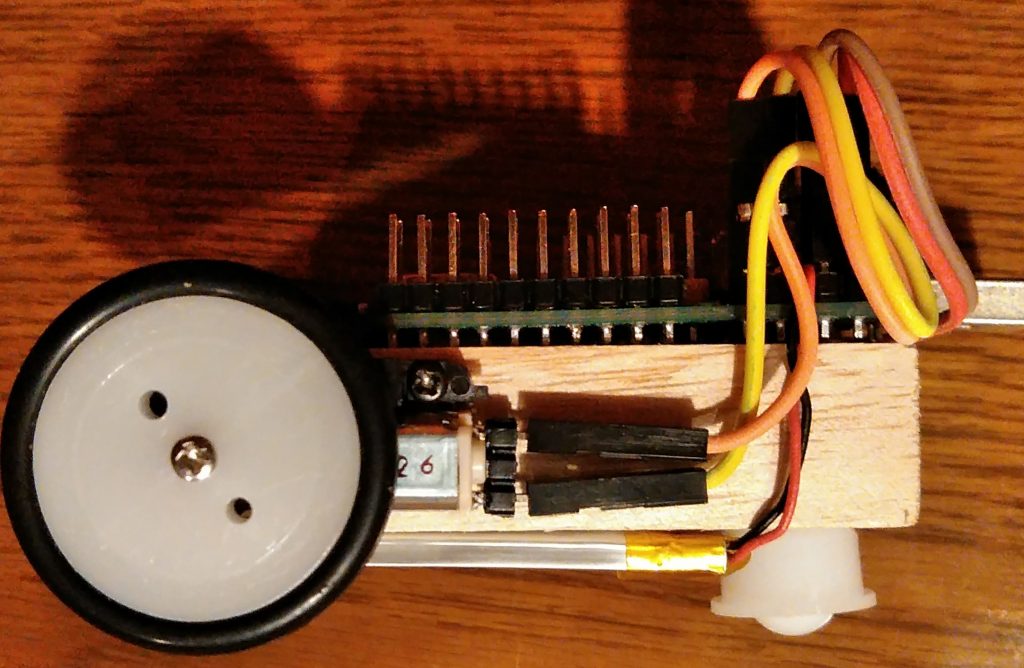
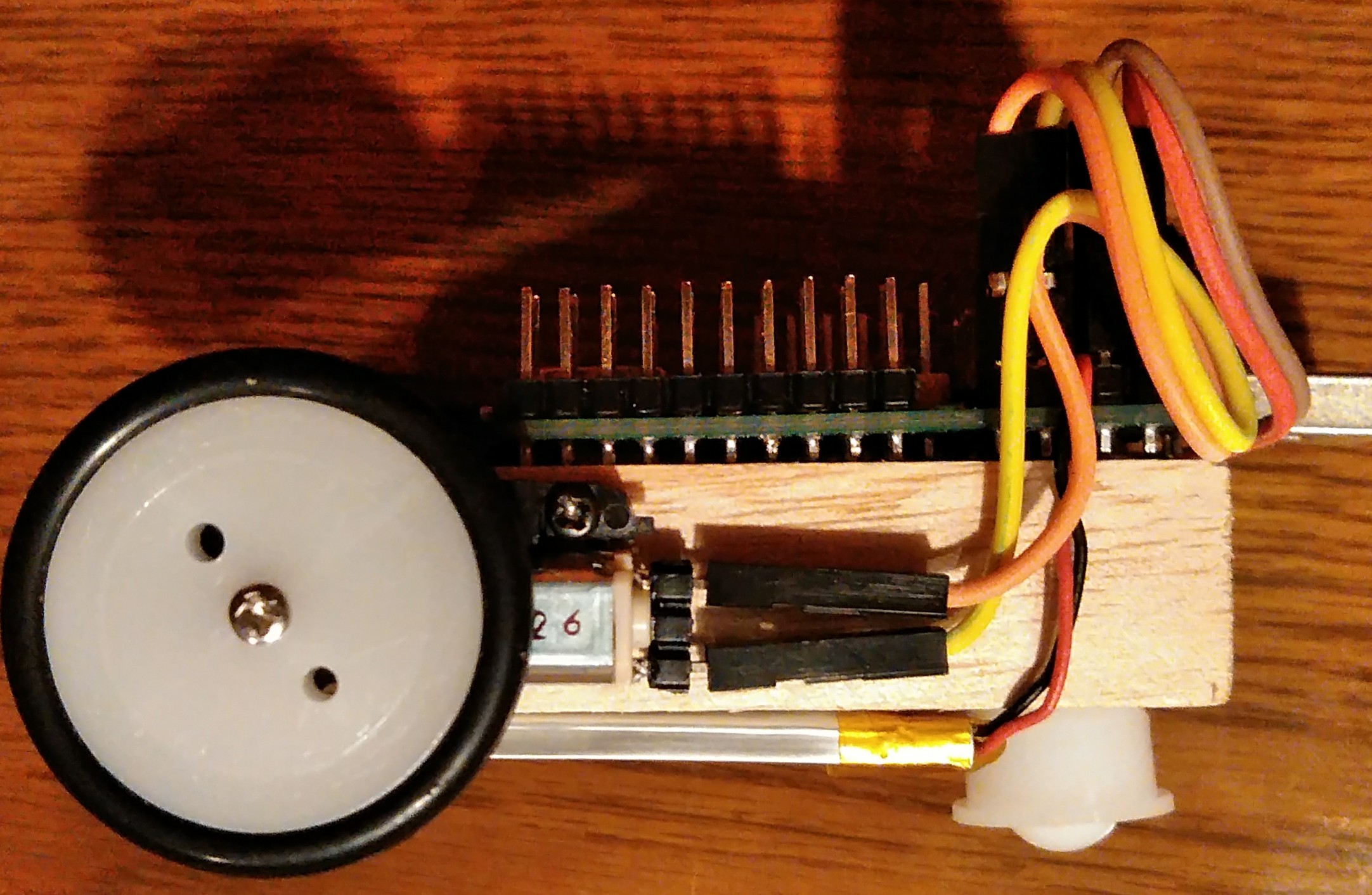
これで組立ては完成です。
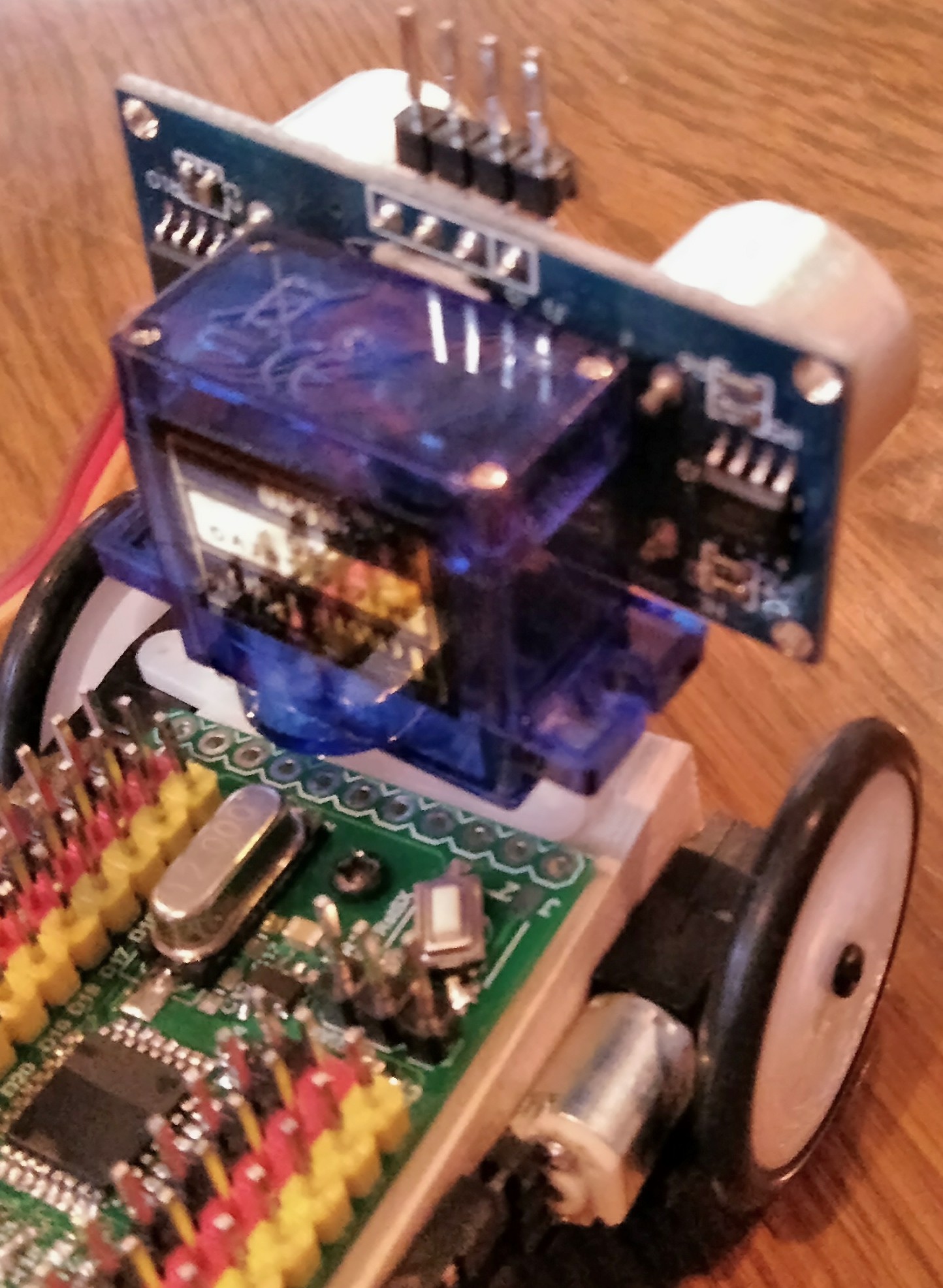
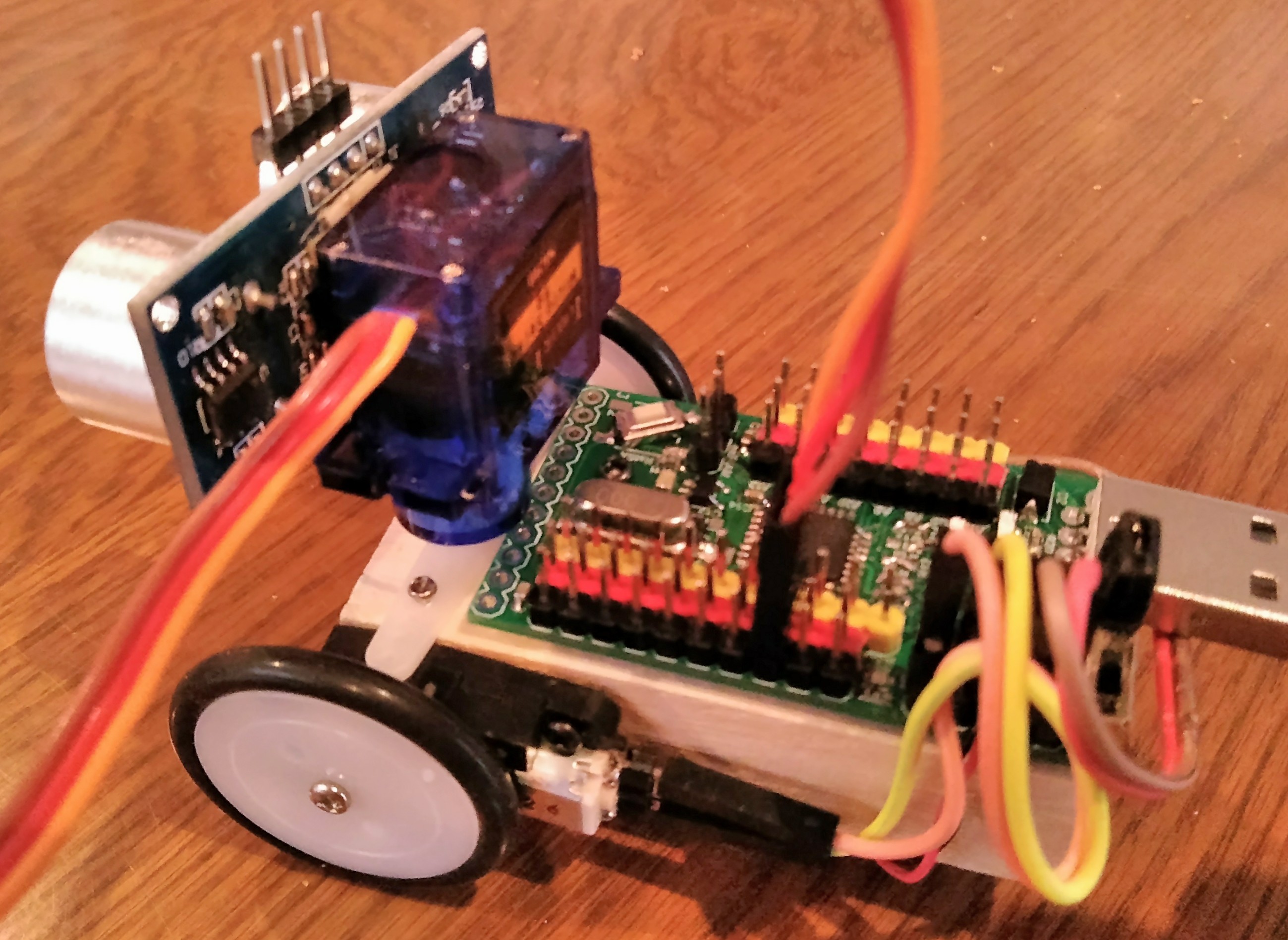
応用例として、マイクロサーボSG90に3.3V超音波距離センサーを貼り付けて、サーボホーンでボディに固定してみました。
サーボは、ArduinoのAnalogWtite()でPWM制御できます。
Ardublockではサーボのブロックが用意されています。
StuduinoBPEでは、D11端子でサーボを使うブロックが用意されています。
3.3V超音波距離センサーは、“HCSR04 Arduino”でライブラリを探してください。
Ardublockではgeneric hardware-超音波のブロックが用意されています。
行きそびれて、買いそびれました。販売予定はおありですか?
購入したのですが、ちびギアモーター2個が入っていませんでした。
頒布したセットで不足品がありましたら、メールにてお知らせください
https://tiisaishop.ddo.jp/syoutorihikihou/
まだ若干あります。連絡いただけますでしょうか
無事届きました。ご対応ありがとうございます。