ちびか~V1.2にアップデートしました。作り方
2017/04/29

ちびか~を V1.2にマイナーアップデートしました。
機能は変わっていません。電源スイッチ基板実装、部品削減、現行部品への更新を行っています。–

–
迷路抜けロボットカー ちびか~ キットを1500円(送料別)で頒布します。
障害物をよけて自立走行するロボカーの組立てキットです。 ArduinoIDEやArdublockでプログラミングできます。
ちびでぃ~のやちびギアモータの採用で、同じような製品と比べて、群を抜く低価格を実現しています。
基板のリード部品はんだ付け、モーターや電池ボックスの配線をはんだ付け、数ヵ所のねじ止めで完成します。

[内容物]
ちびでぃ~のPro(ファーム書込済ATMega8実装済、10KΩx2、0.1uF、100uF、8MHz、LED)、CH340USBシリアルモジュール+ケーブル、(ちびギアモーター+タイヤ)x2、超音波距離センサー、電池ボックス、電源スイッチ、ピンソケット、ピンヘッダ、取付ねじ(1.7×6 4本, 1.4×6 2本 )
(別途、単三ニッケル水素充電池4本が必要です)
車体の組立て
車体の電池ボックスの両脇中央に、ちびギアモーターを配置して、2輪走行します。

–
このリンクの組立て方を見ながら、ちびギアモーターに車輪をねじ止めします。
下の写真のように、1.4×6タッピングねじを電池ボックスの+極の穴に挿します。
このねじをギアモータの真ん中の取付け穴に挿して、ギアモータが固定されるまで、ねじ込みます。
もう片側のギアボックスは、上の写真のように、対照となる向きに取り付けます。

–
電池ボックスを裏返して、電池の曲面を床に接触させて走行する事で、前輪キャスターを省きました。 できるだけタイヤの高さを低くして、方向転換時のガタツキを抑えます。 平坦な所で走らせれば、すばやく走行・旋回します。

–
電池ボックスの裏側が上面になり、なのぼ~どAGやちびでぃ~の等が搭載できます。
今回は、ちびでぃ~のProを裏返しにして搭載しています。

–
ちびでぃ~のProの抵抗やコンデンサーを下写真のように半田付けします。
10KΩ x 2, LEDは向きがあります。写真の下側が長い方のリード線(+)です。部品面の高さが低くなるように、横にして基板の端に取付けます。

.
裏面に0.1uF、100uF電解コンデンサ、 8MHzクリスタル、スライドスイッチ、ピンヘッダー、ピンソケットを取付けます。(下写真)
100uF電解コンデンサは向きがあります。写真の下側が長い方のリード線(+)です
ピンソケットをニッパーで4ピンに切り、写真のように取付けます。 5ピン目の所にニッパーの刃をあてて切ります。
同じようにピンソケットを2ピン、4ピンに切ります。後でモーターと電池ボックス配線に使います。
ピンヘッダを15ピン、10ピン、6ピンに切り、写真のように取付けます。

–
1.7×6のタッピングねじを電池ボックス側から差し込み、上記写真の、基板の1.5mm取付穴2箇所にねじ込んで固定します。

–
電池ボックスの電源線とピンソケット2ピンを写真の様にはんだ付け配線します。
端子部分をテープや熱収縮チューブ等で保護する事をお勧めします。
ちびでぃ~のProのピンヘッダに配線したピンソケットを差し込みます。
電源は、1.2Vのニッケル水素電池4本で4.8Vを供給します。 赤:5V、 黒:0V

–
モーターとピンソケット4ピンを写真の様に配線します D7,8:モーター1 D9,10:モーター2
端子部分をテープや熱収縮チューブ等で保護する事をお勧めします。
モータはATMega8に直結で駆動します。

–
はんだ付け済み版も、上写真と同様に、ピンヘッダと電源・モータ端子間を配線します。
–超音波距離センサーを4ピンピンソケットに差し込みます。
これで、組み立ては完了です。
MPU ATMega8には、ブートローダーと迷路抜けスケッチが書き込まれています。
ニッケル水素充電池(1.2v)を4本電池ボックスに取り付けます。
スライドスイッチを基板内側にすると電源ONとなり、モーターが回ります。
距離センサーに手をかざすと、LEDが点灯して、少しバックしてから右か左に回転します。
ワイヤレスちびか~の続きは、前のページに戻って作業を続けてください。
–
以下は、ちびか~でのArdublockプログラミング方法です。
–
USBシリアルモジュールをPCに挿して、Arduinoからスケッチをアップロードする
電源スイッチを切ります。
ちびでぃ~のpro に USBシリアルモジュールのコネクタを向きを間違えないように接続します。
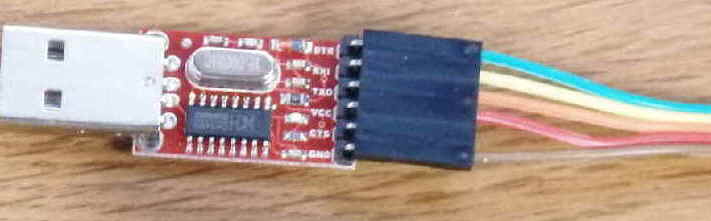
写真のように端から、茶色(0V)、赤(5V)、橙(RX)、黄(TX)、緑(DTR)

–
USBシリアルモジュールが赤い基板の場合は、下の写真のようにケーブルを接続します。
–
CH340USBシリアルモジュールのデバイスドライバーをPCにインストールします
ちびでぃ~のPROを、PCと接続してarduinoIDE環境で使う
ArdublockとArduinoやデバイスドライバを含めた全部入りのwindows用ファイルをダウンロードできます。任意のフォルダに解凍して、arduino.exe を実行します。
Ardublock単体をインストールする場合は、このファイルを解凍して、Arduinoフォルダの tools\ArduBlockTool\tool フォルダに置いてください。インストール例はこちらです。
Arduinoの Tools – board プルダウンメニューから”chibiDuino pro ATmega8 38400 optiboot”を選択し、Tools – portで、USB接続したポート名を選択します。
これでスケッチのアップロードができるようになります。
Arduinoの Tools –プルダウンメニューを開くと、 ArduBlockが追加されていますので、これをクリックします。
ちびか~に出荷時に書き込まれている、Ardublockの迷路抜けスケッチは TIBIMO3.abp です。
Ardublock画面からloadボタンを押してこのファイルを読み込んでから、uploadボタンを押してちびか~のプログラミングができます。
以下の手順で、自分でプログラミングしてみましょう
・前後左右、停止のサブルーチン
・距離センサーが5cmになるまで前進
・距離が距離センサーが5cmになったら停止して、少し後退
・右か左を向く
ー

ー
__________________________________________________
__________________________________________________
[…] ちびか~は、V1.2にアップデートしています […]
[…] ●作り方は、ちびか~ページを参照ください。 […]
沖縄から購入しました。飯塚です。
コンピュータ教室の環境が著しく悪いため、
自分の教室でラズパイ+ラズビアンLinuxで動かしたいと思います。
このWebサイトでLinuxの参考サイトのリンクが切れているようです。
ご指南いただけますと、ありがたいです。
WEBアーカイブに残っていますので下記URLでご覧ください
https://web.archive.org/web/20141130061925/http://www.linux.it/~malattia/wiki/index.php/ChibiDuino_RoboCar
ちびか~V1.2を学校の教材として購入しようと計画していますが私の学校では管理者権限が無いとCH430系のドライバーはインストールできません。PL2303シリーズのUSBシリアル変換のドライバーはWINDOW 7、8 では組み込まれているとのことなのでPL2303シリーズのUSBシリアル変換器付のちびか~V1.2を購入したいのですが可能ですか?