2010/01/01
–
・お手軽なarduino環境を模索中
1000円以下のarduino互換機 ちびでぃ~の2、
arduinoガイガーカウンター geigerduino、
等をMakers Fair Tokyo 2015 に、出展、大好評でした。
キット、完成品を頒布しています。
Makers Fair Tokyo 2015 に向けて、新しいバージョンも作成していきます。
・ケース付実用電子工作キットも紹介しています。
入門者から経験者まで、1000円以下のお手軽なキットの頒布も始めました。
電子工作の楽しさを、より多くの方と共有していければ良いな♪
みなさま、よろしくお願いします ぺこ
by: ともん twitter @tomonnn1 e-mail: tiisaidipjp (at) gmail.com
__________________________________________________
投稿 by tomonnn1 in はんだづけ
No Comments »
2022/01/25
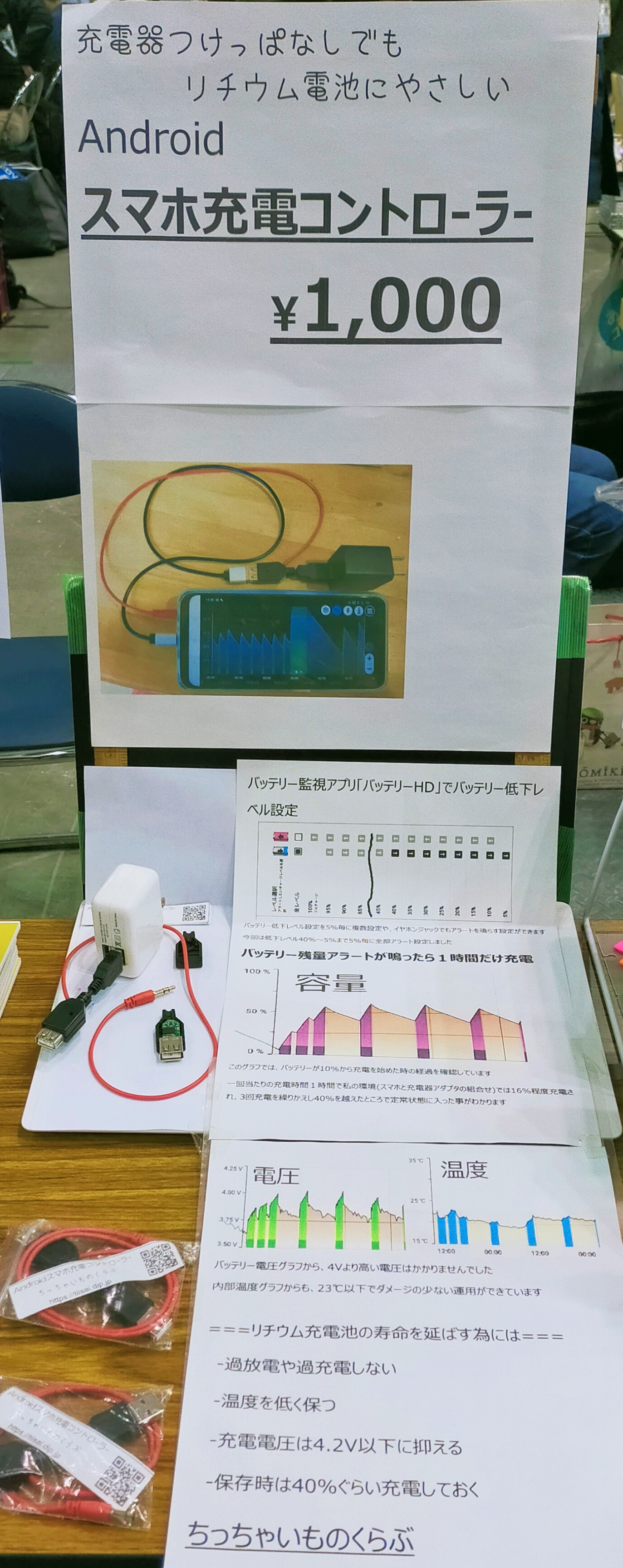
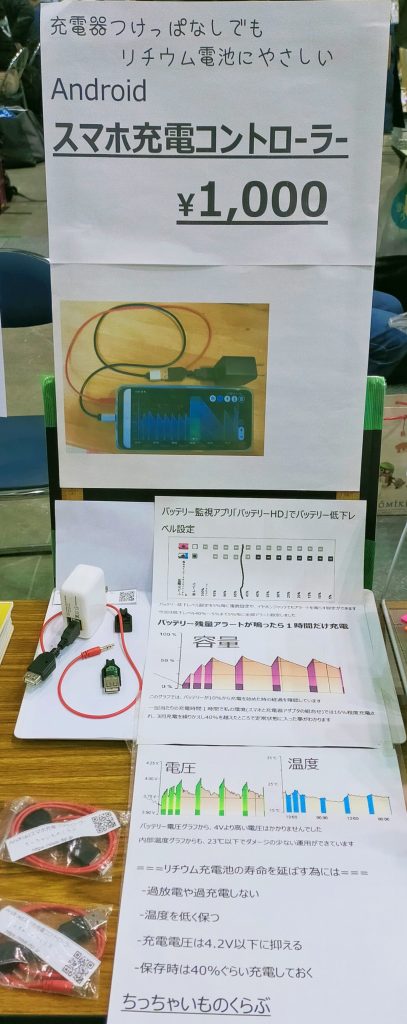
充電器つけっぱなしでもリチウム電池に やさしい
Androidスマホ充電コントローラー
コミケ99で頒布開始しました
お古のスマホを見守りカメラやWIFIデザリング用として再利用しているのですが、
スマホやタブレットを電源アダプタにつなげっぱなしで運用する為、満充電の状態が続きリチウム電池の寿命が短くなってしまいます。
50%前後の充電状態を維持しながら長期間連続運用できるコントローラーを作りました。
試作の過程はこちらをどうぞ
製品版設計の過程はこちらをどうぞ
製品の過程はこちらをどうぞ
–
使い方
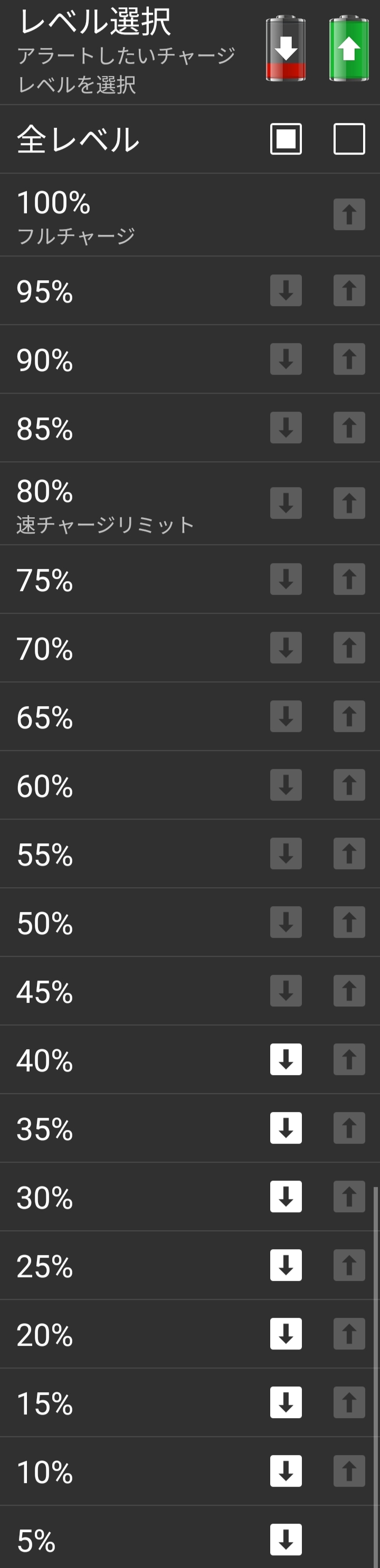
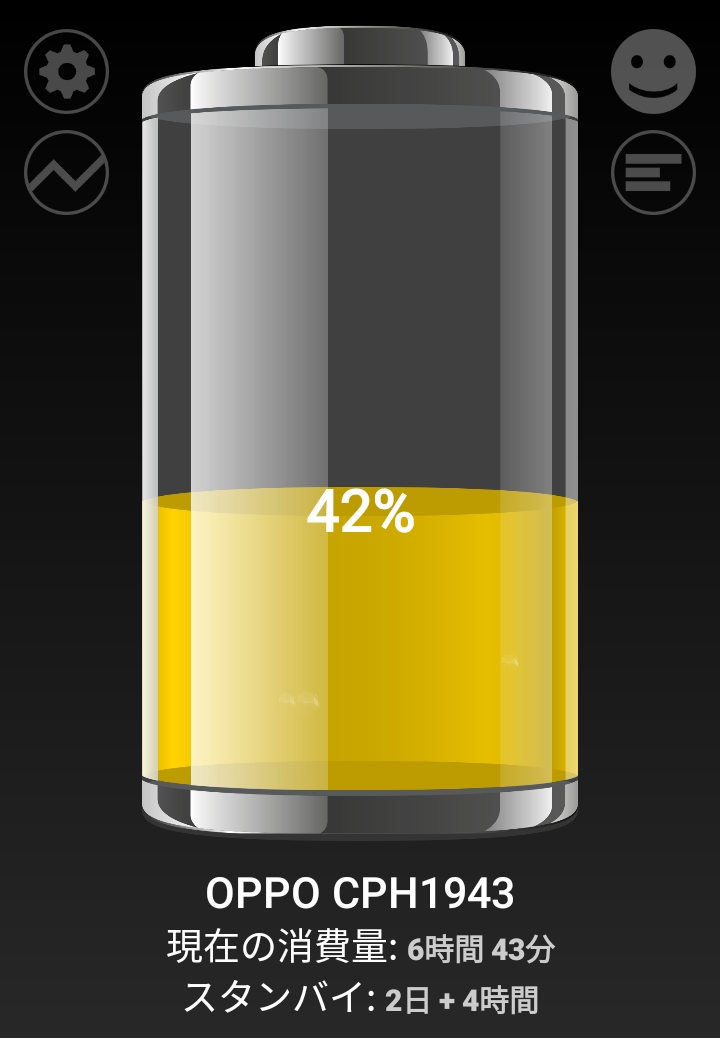
スマホに「バッテリーHD」という充電監視アプリをインストールします。
アプリ起動して、初期設定
設定アイコンをクリック
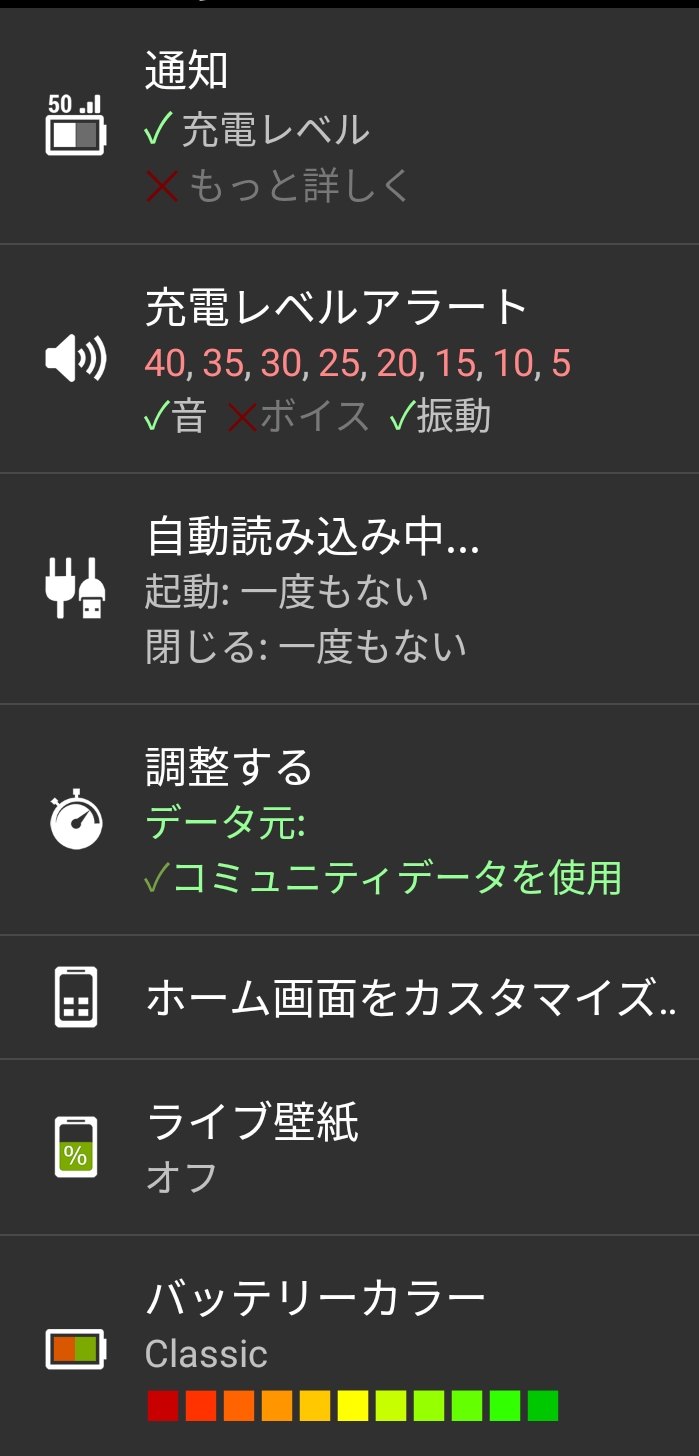
充電レベルアラートをクリック
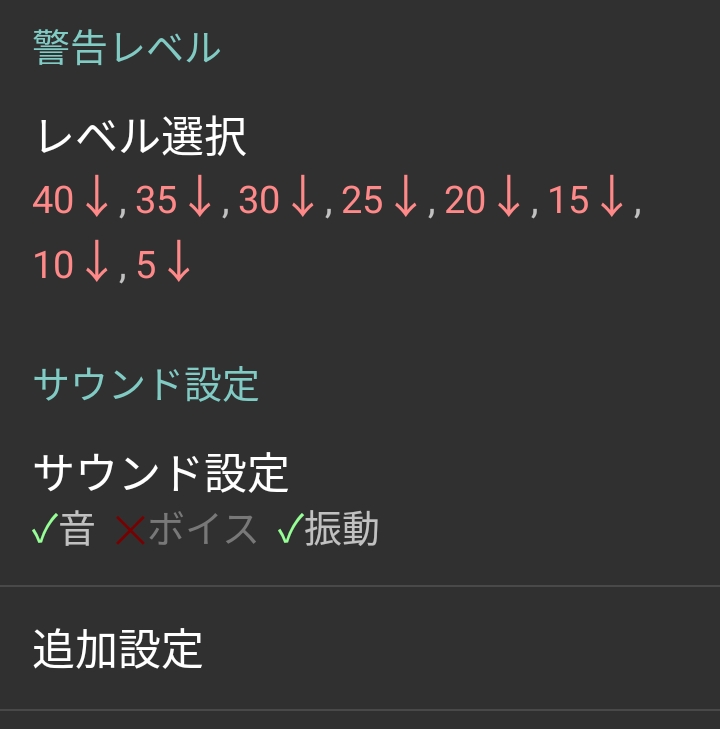
レベル設定をクリック
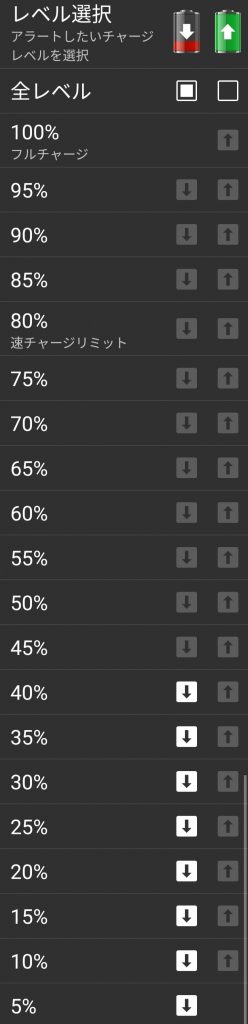
40%~5%以下の下矢印を全部チェックして、戻る
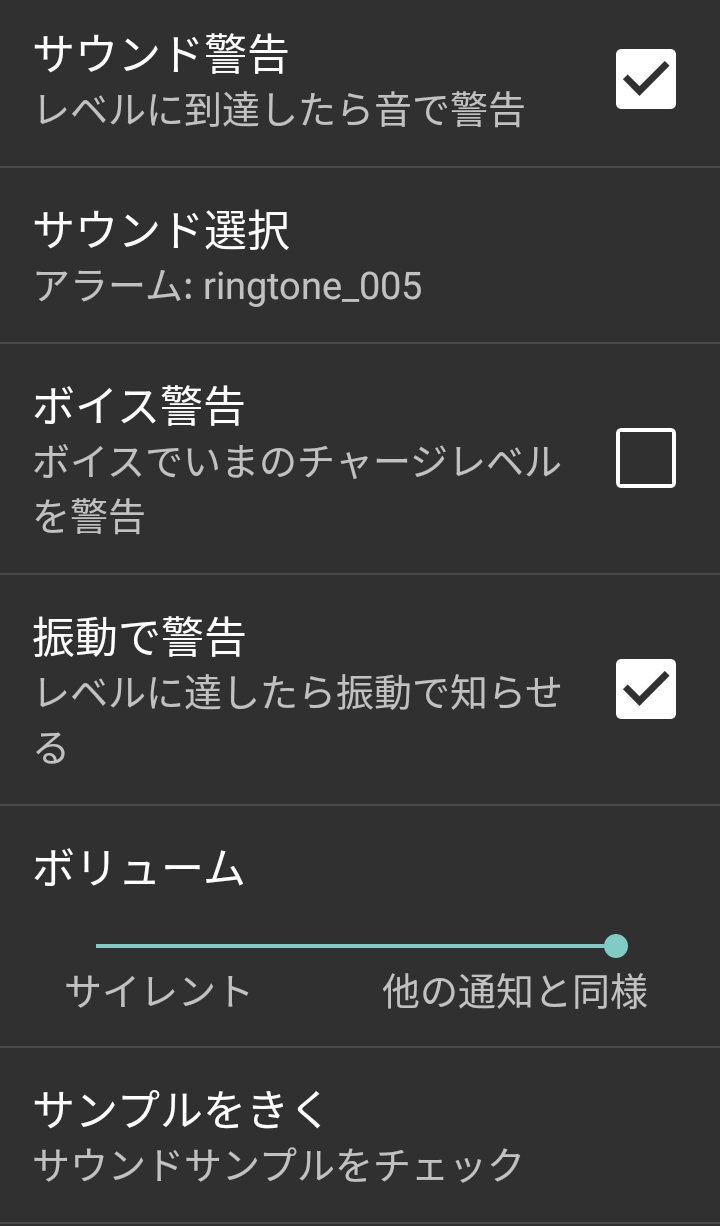
サウンド設定をクリック
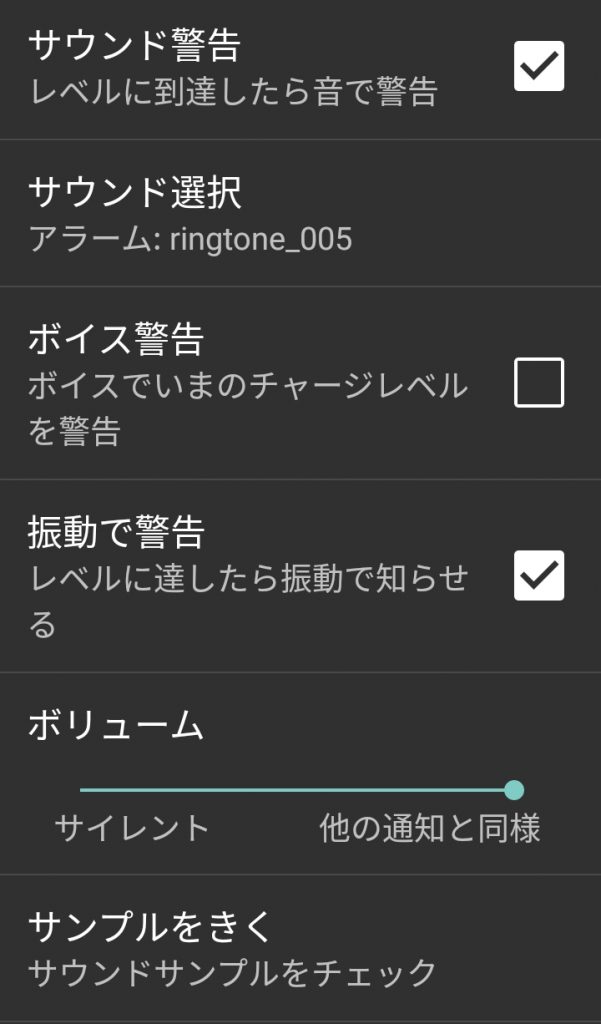
サウンド警告と振動で警告をチェック、ボイス警告のチェックをはずす
サウンド選択をクリック、

アラームをクリックして通知音を選択(うるさい音源を選んでください)
ボリュームを最大にスライド
戻る
追加設定をクリック
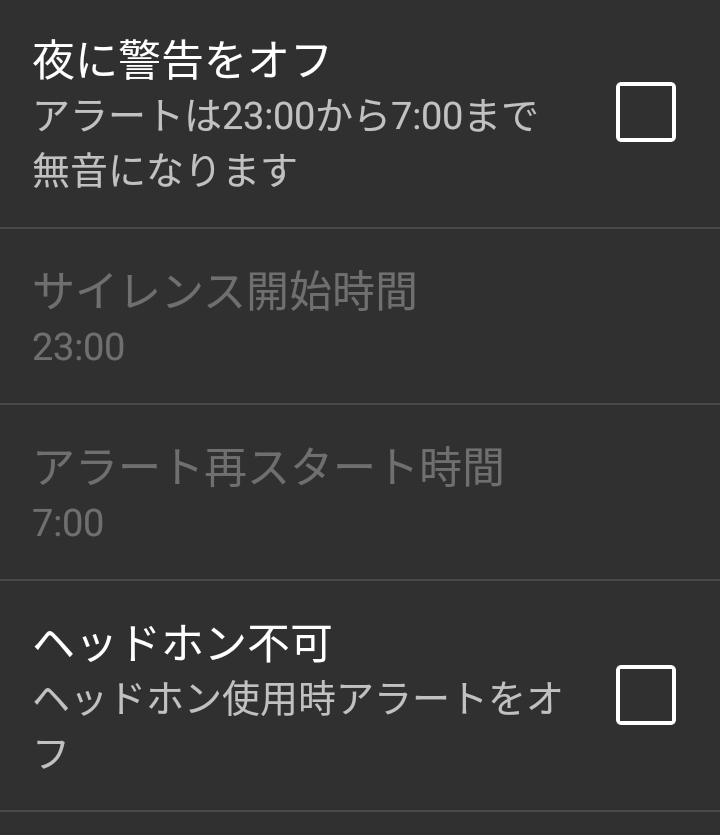
夜に警告をオフ のチェックをはずす
ヘッドホン不可 のチェックをはずす
戻る
戻る
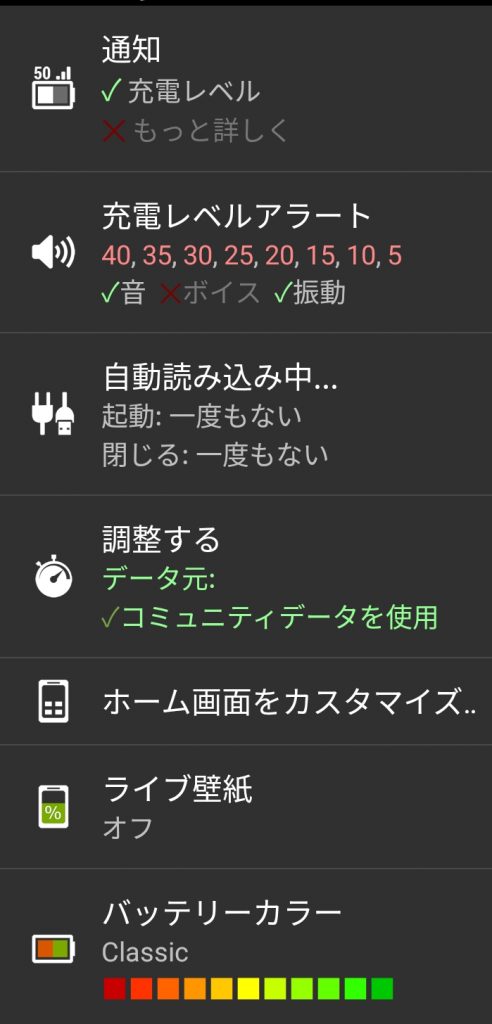
自動読み込み中をクリック

充電器、USB、ワイヤレス充電器 のチェックをはずす
閉じるをクリックして
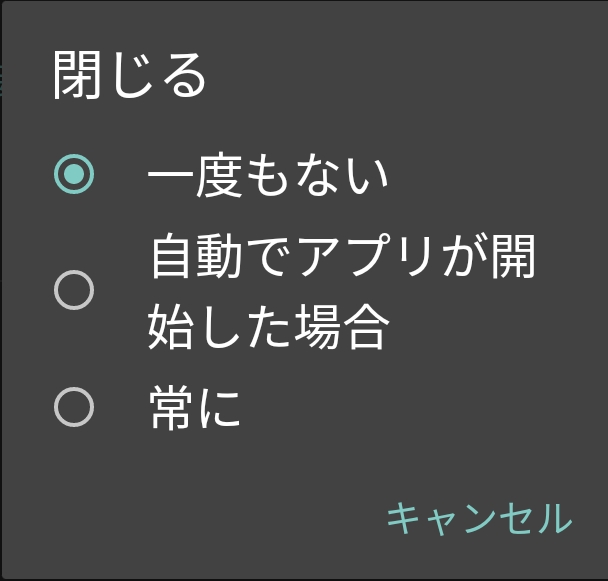
一度も無いをチェック
戻る
戻る
以上で設定終了です
以後、Android立ち上げ時には、バッテリーHDアプリを起動してください。
配線を接続

充電コントローラUSBジャックを充電アダプターに接続
充電コントローラUSBプラグをUSBケーブル経由でスマホのUSB端子に接続
充電コントローラ赤いミニジャックをスマホのイヤホン端子に接続
以上の設定で、バッテリー監視アプリからのバッテリー低下時の通知音で充電コントローラが充電開始し、一時間だけ充電します。
一時間の充電量はスマホの消費電流と充電アダプターの充電電流によって変化します。充電アダプターを選んで10%~20%程度充電されるように調整します。
他アプリからの通知音によって充電タイマーが開始されないように、それらを切ってください。
投稿 by tomonnn1 in arduino, AVR, はんだづけ
No Comments »
2019/02/12
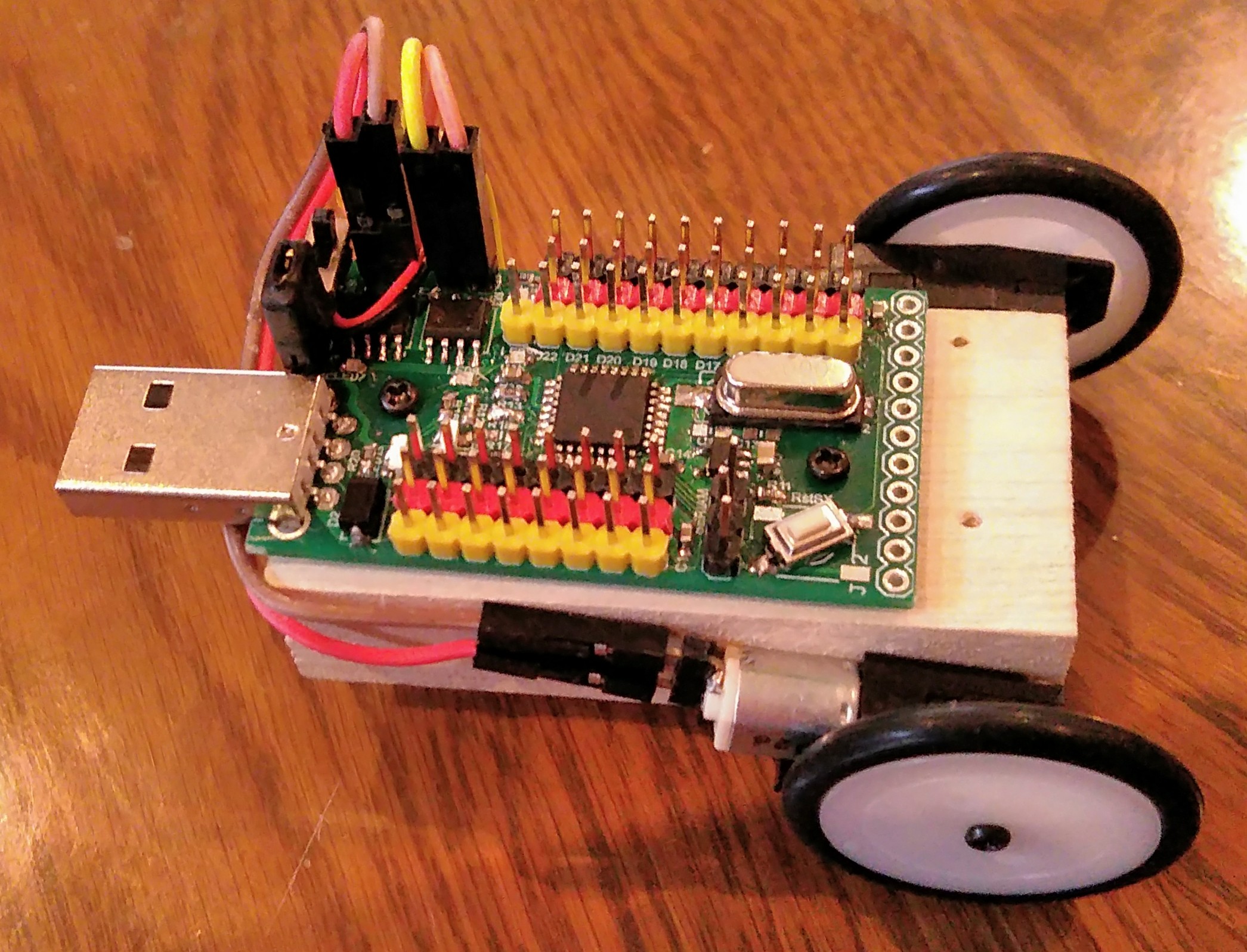
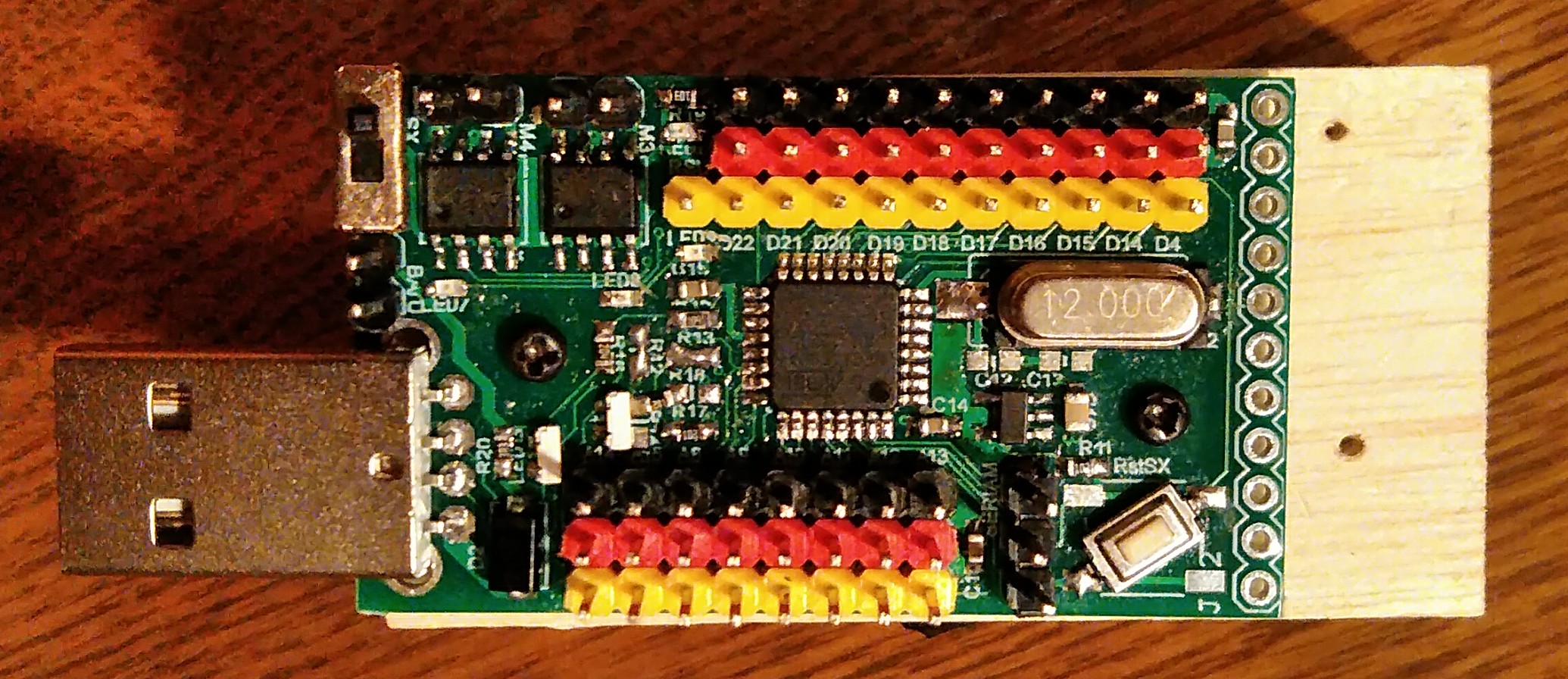
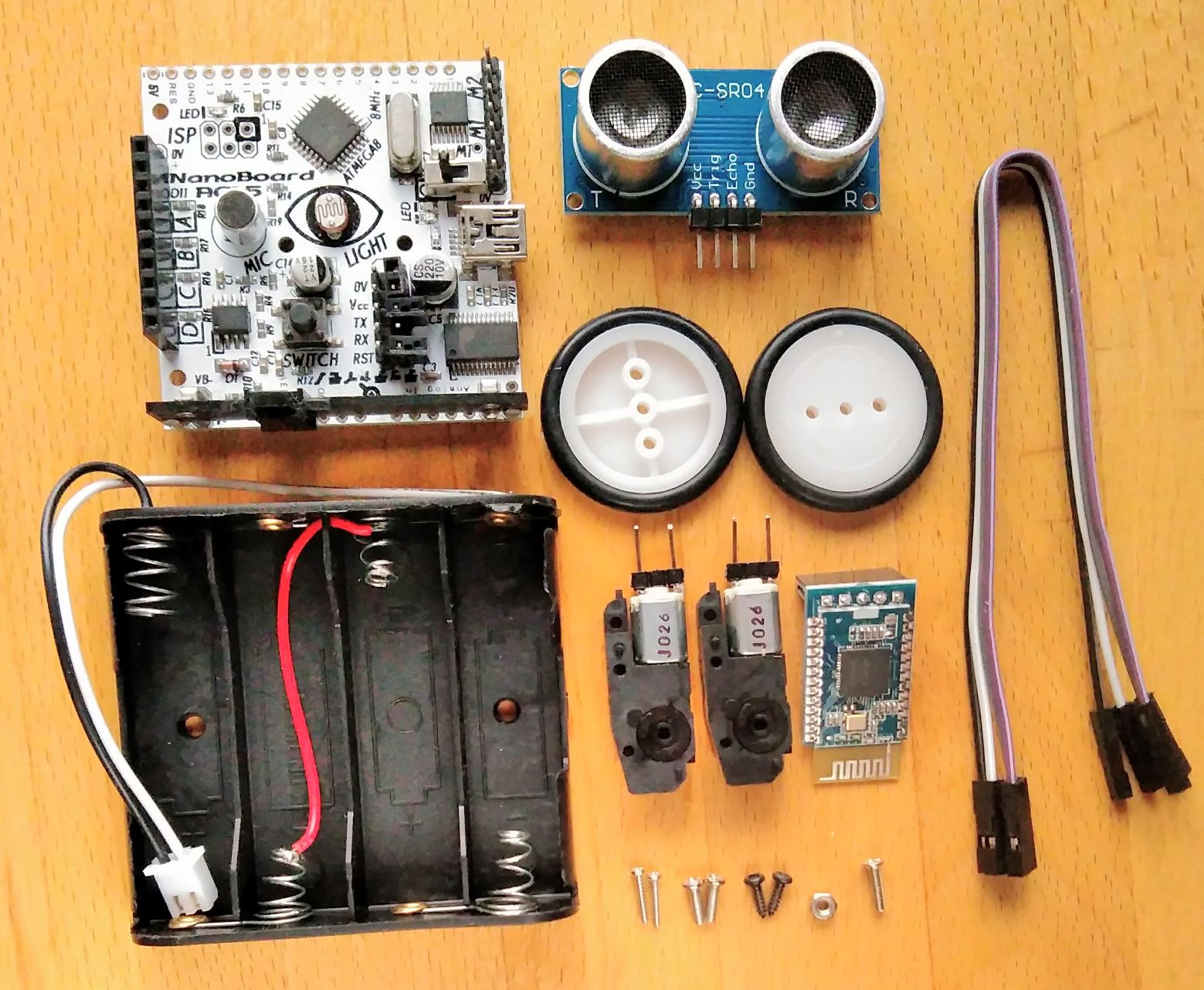
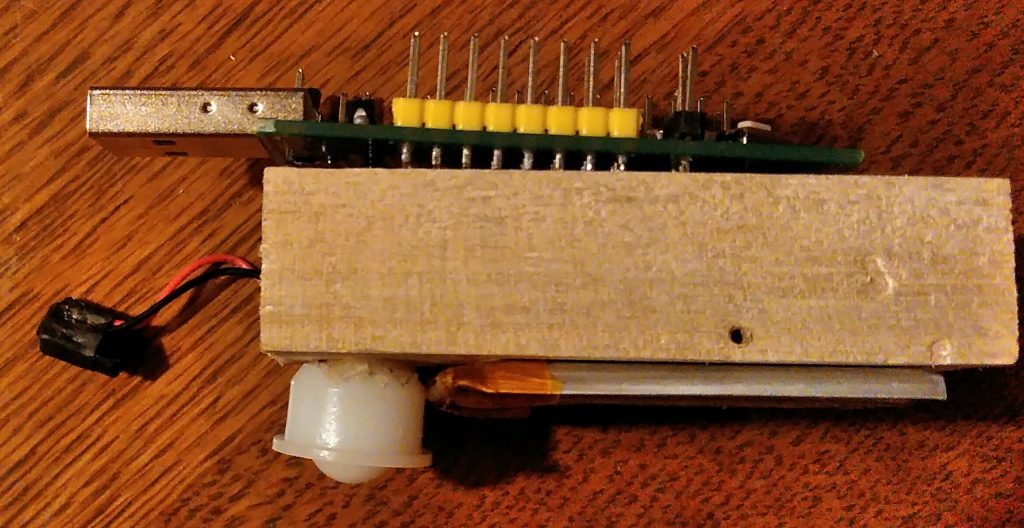
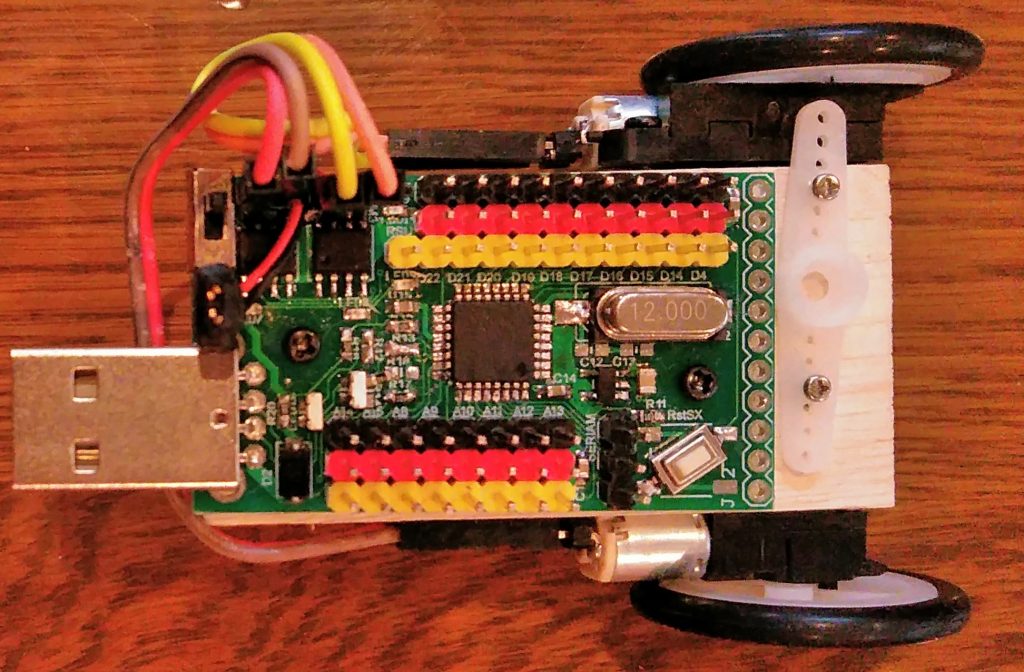
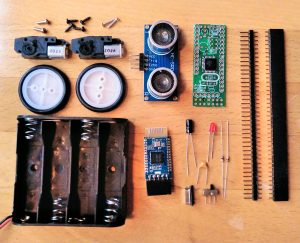
あそぼ~どに搭載された機能を評価できるようなロボットカー部品キットを同人ハードウエアフェス2019にて頒布しました。
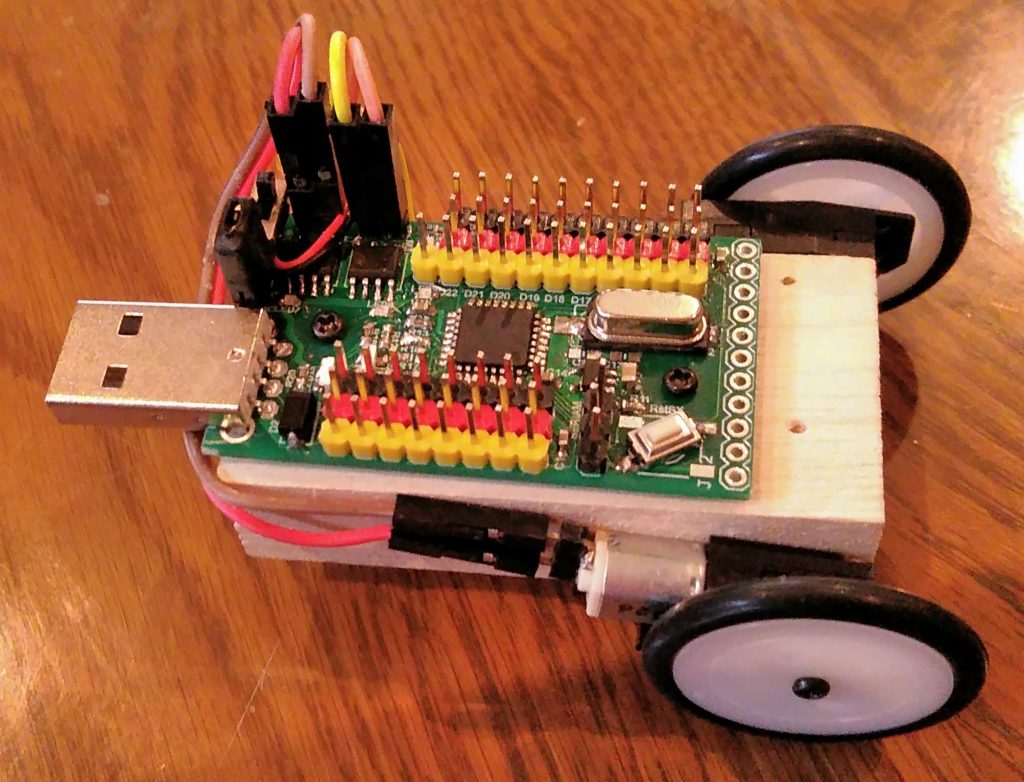
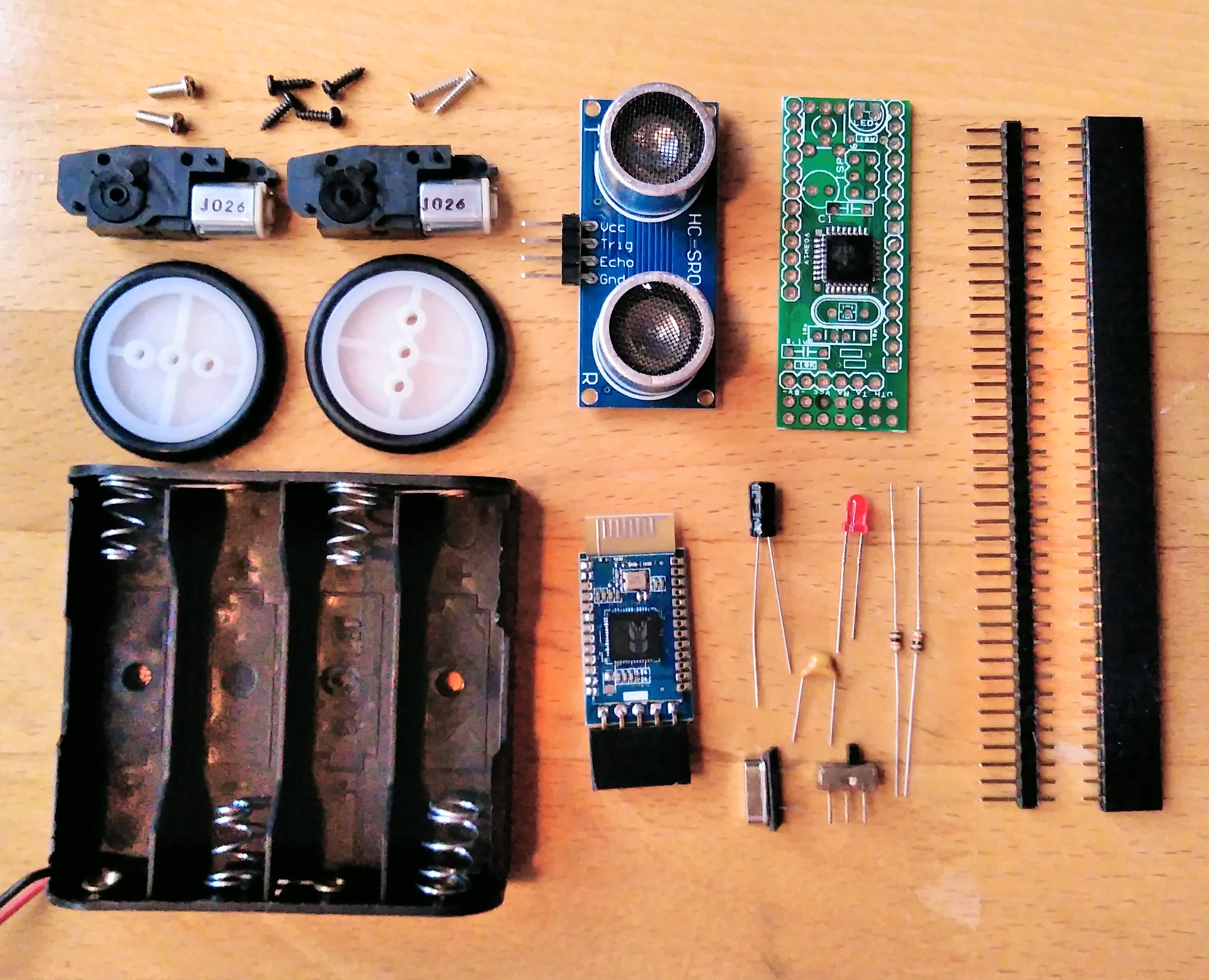
部品リスト
あそぼ~ど、Lipo充電池、ちびギアモーター2個、タイヤ2個、ちびキャスター、木片、ねじ(1.7x6mm4個、2×8mm2個)、ジャンパー配線4本
頒布したセットで不足品がありましたら、メールにてお知らせください
作り方
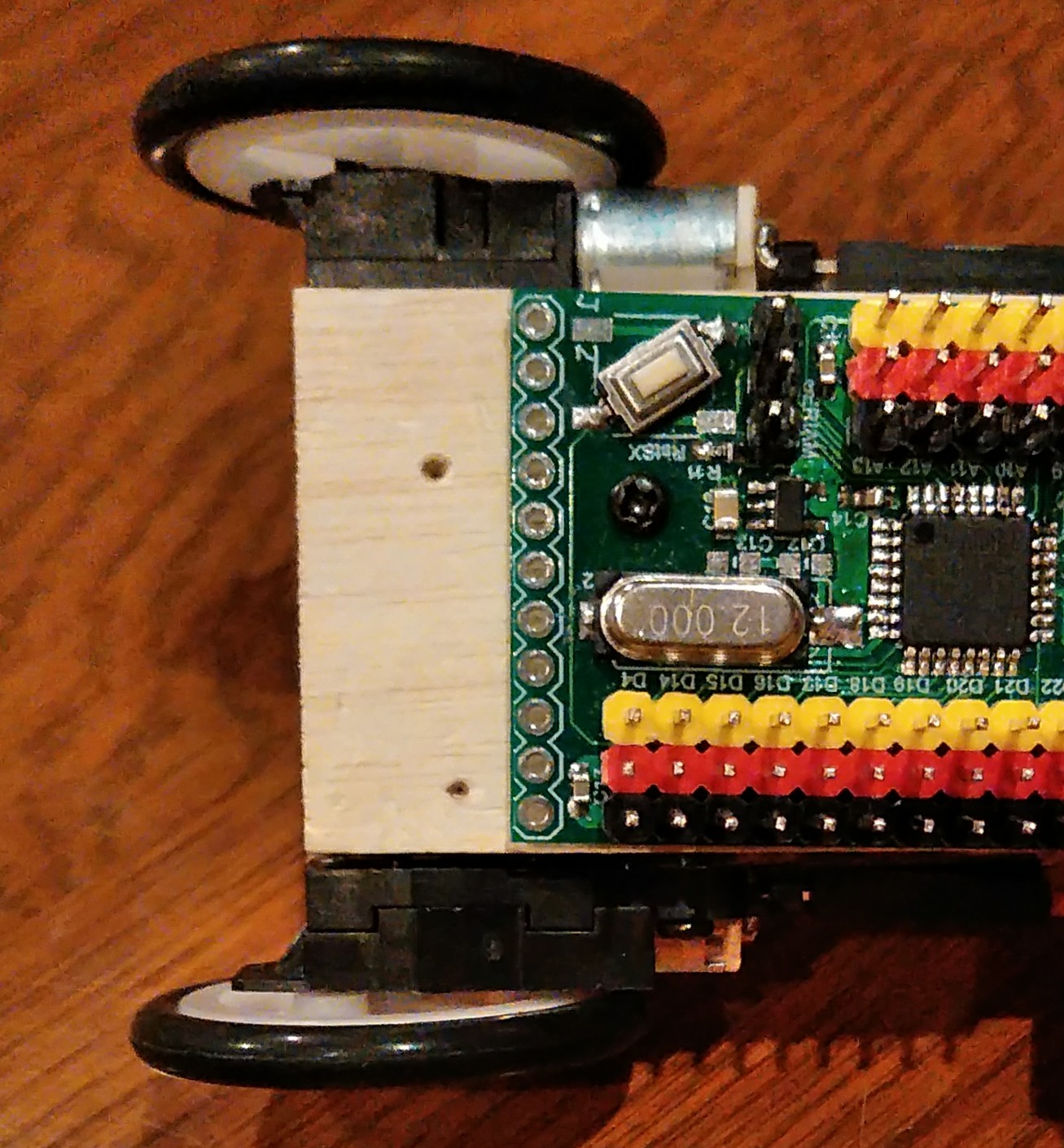
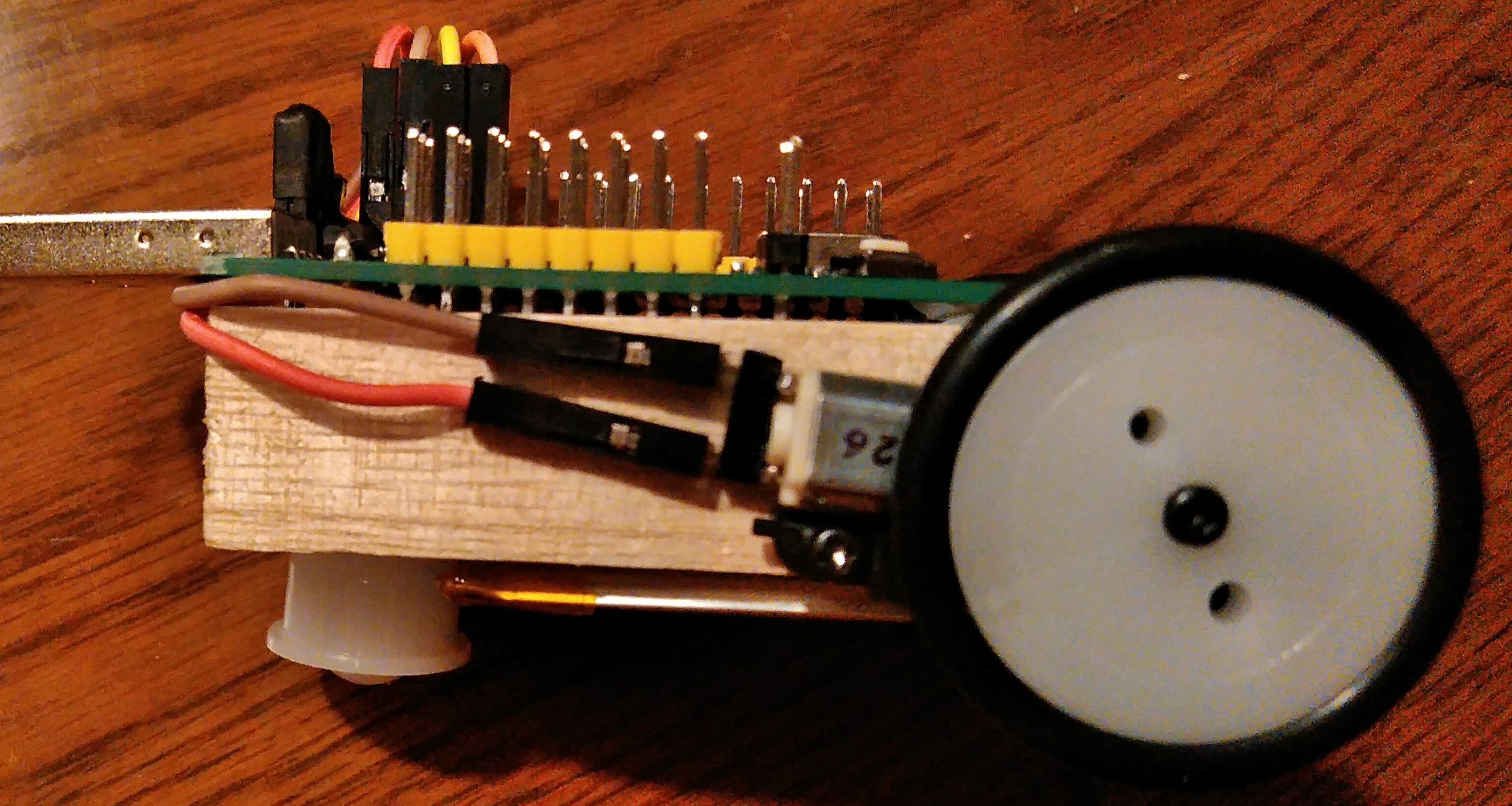
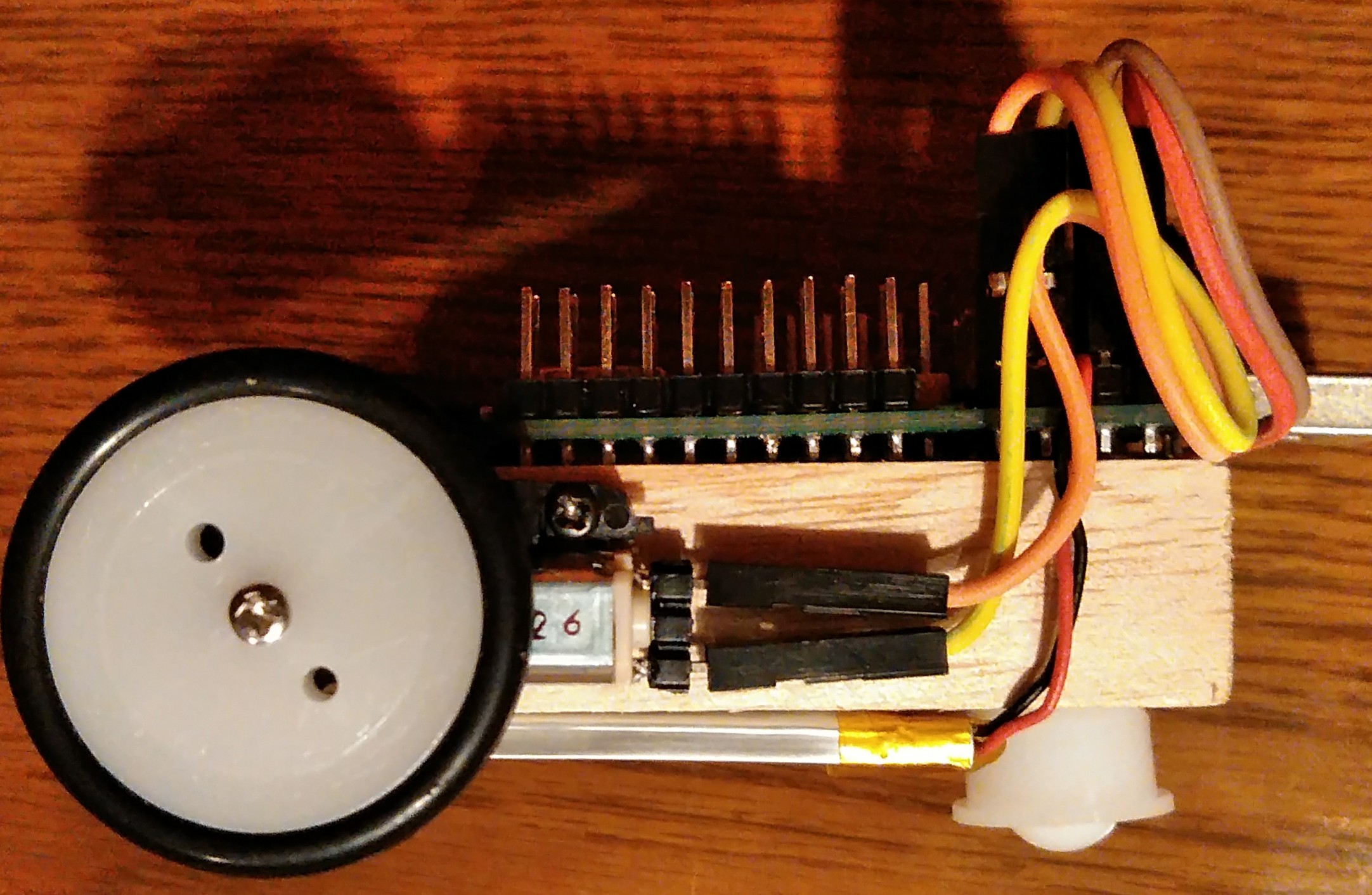
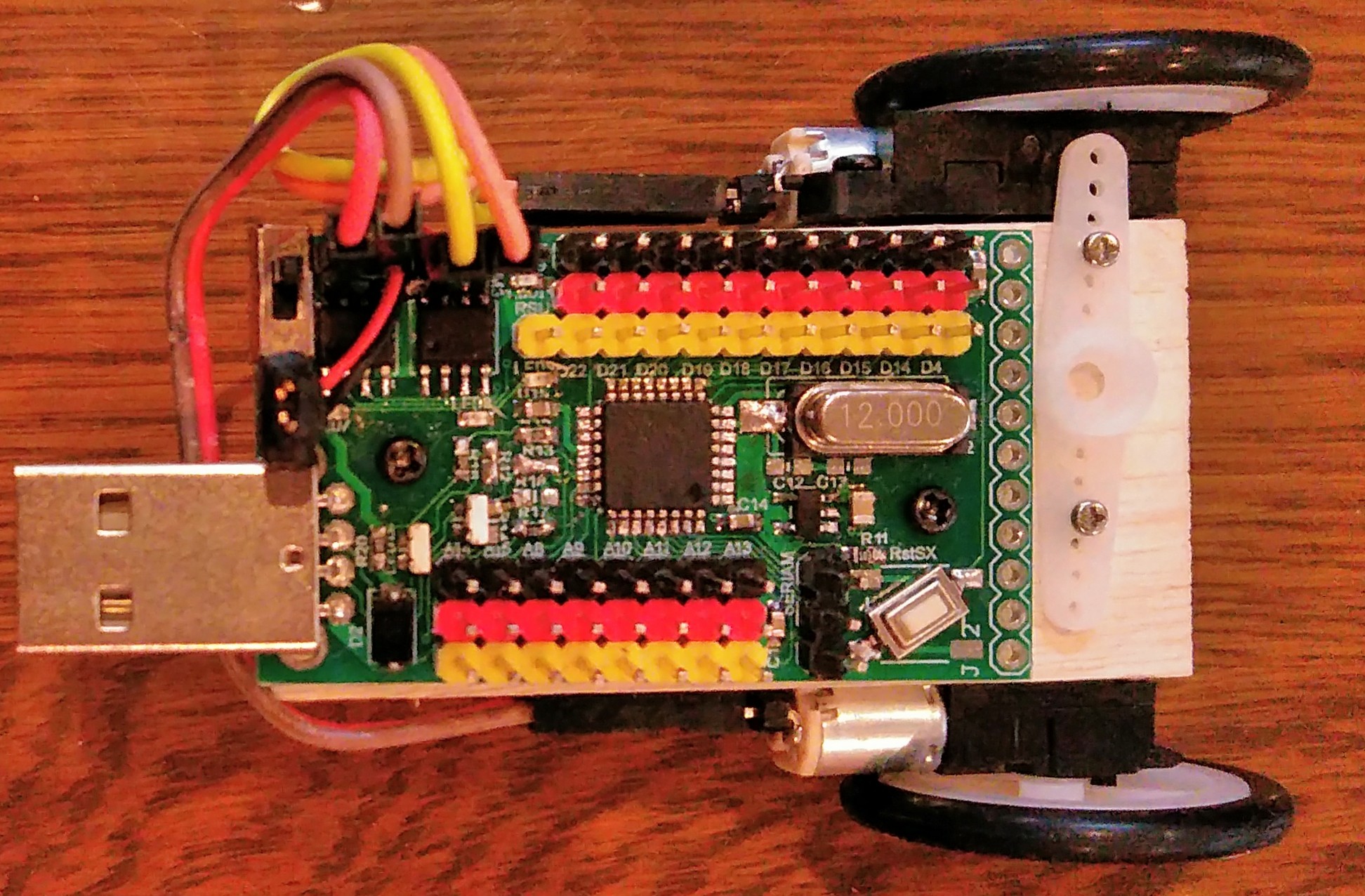
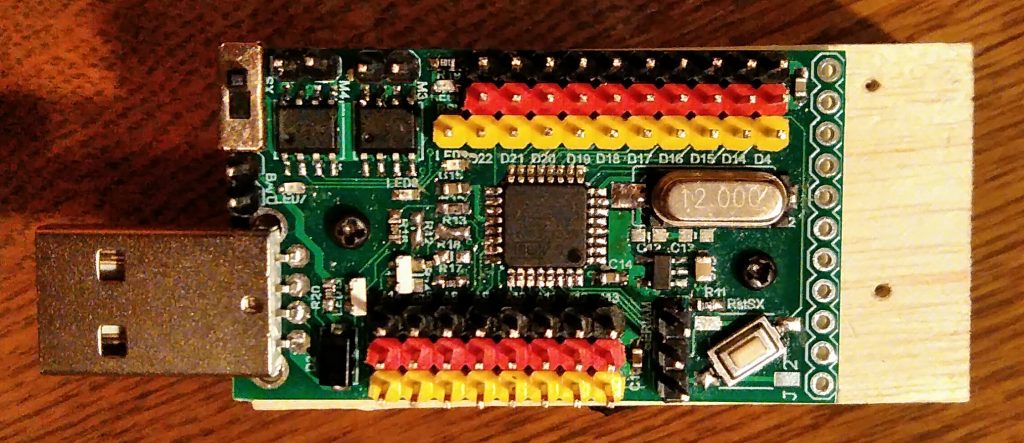
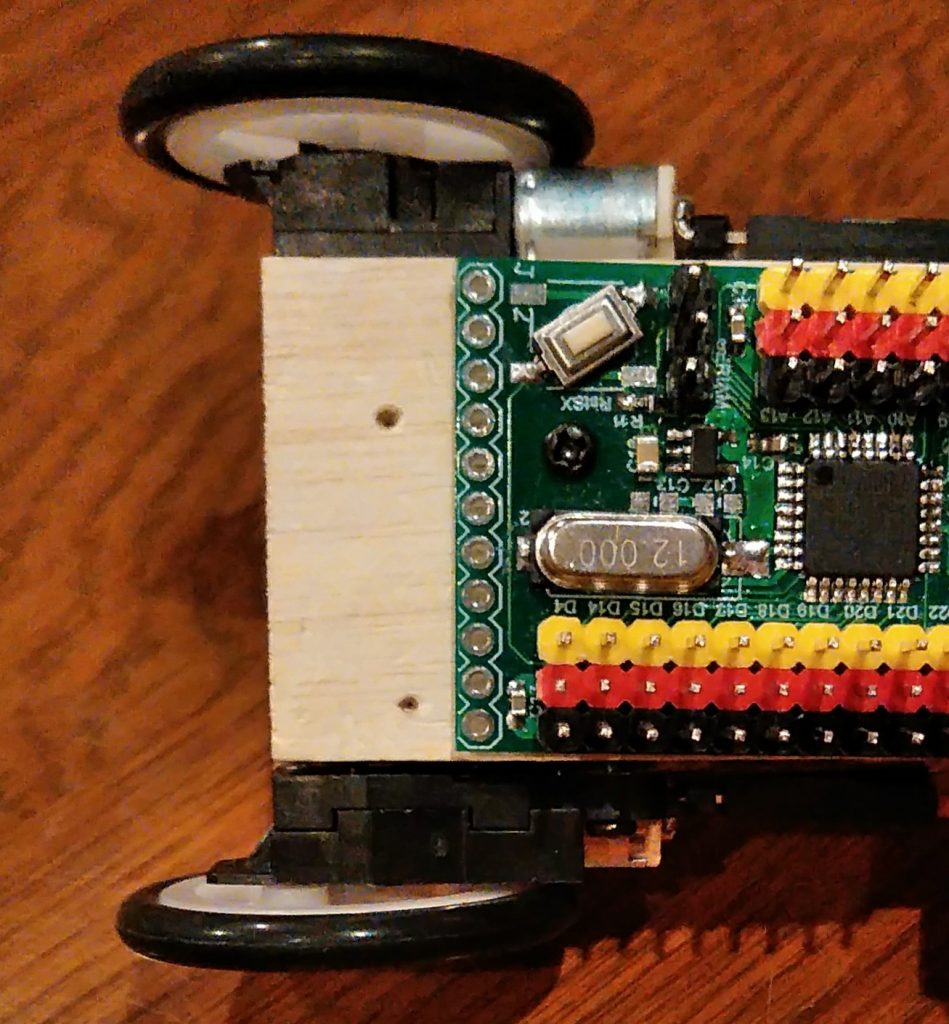
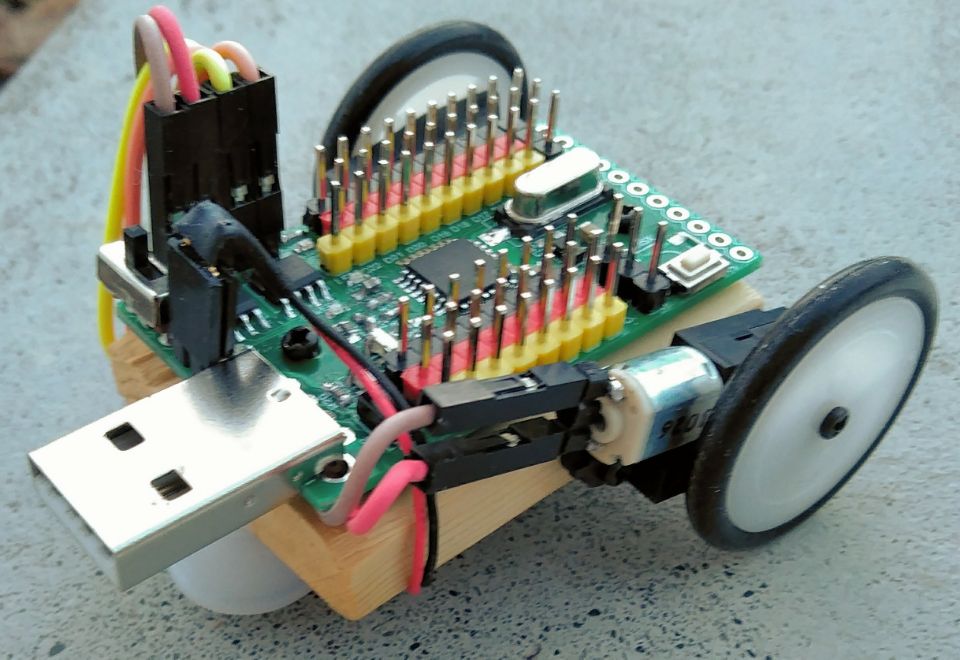
- あそぼ~どを木片に黒ねじ止め(1.7x6mm2個) USBコネクタ側の基板と木片端を合わせます。
 –
–
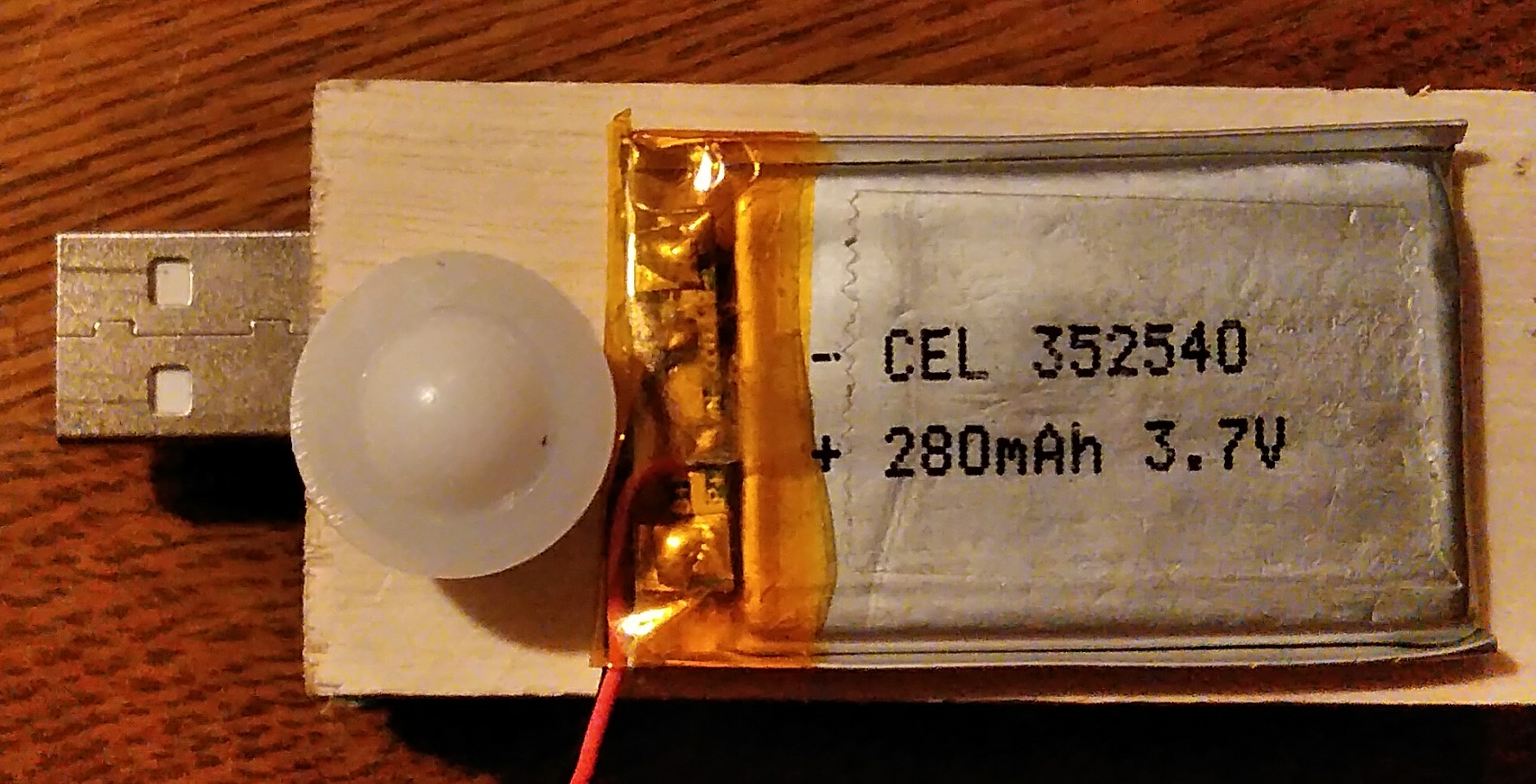
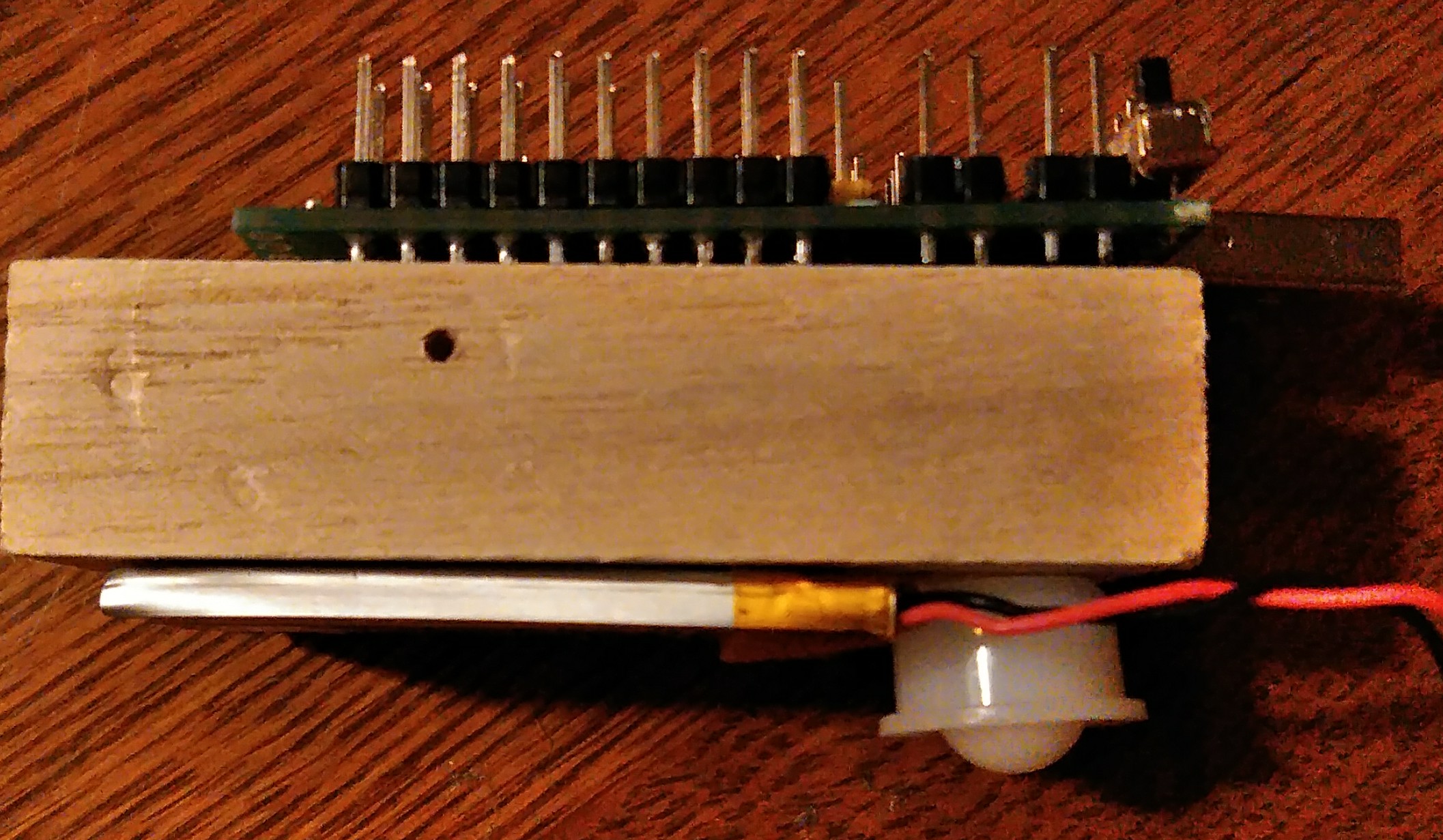
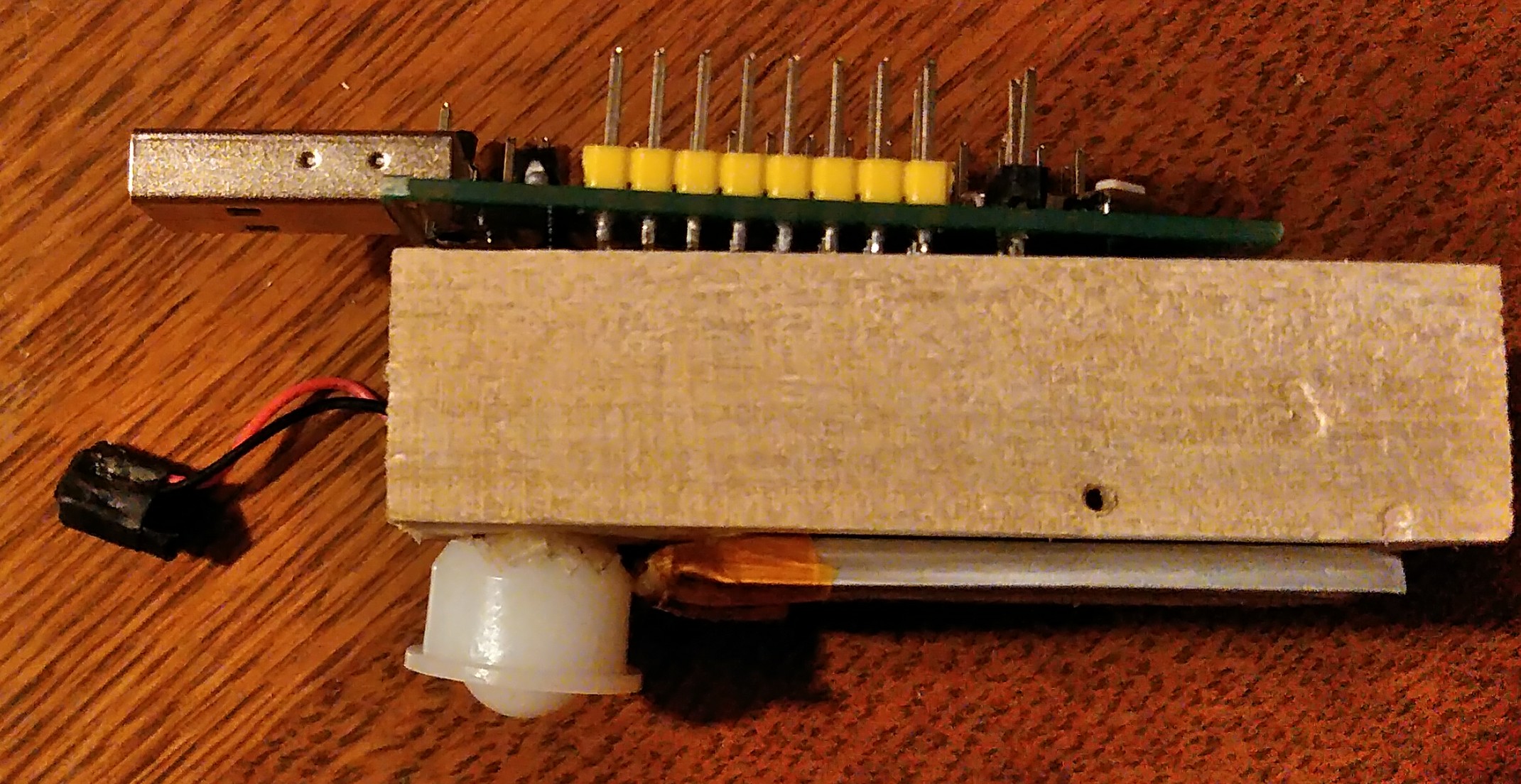
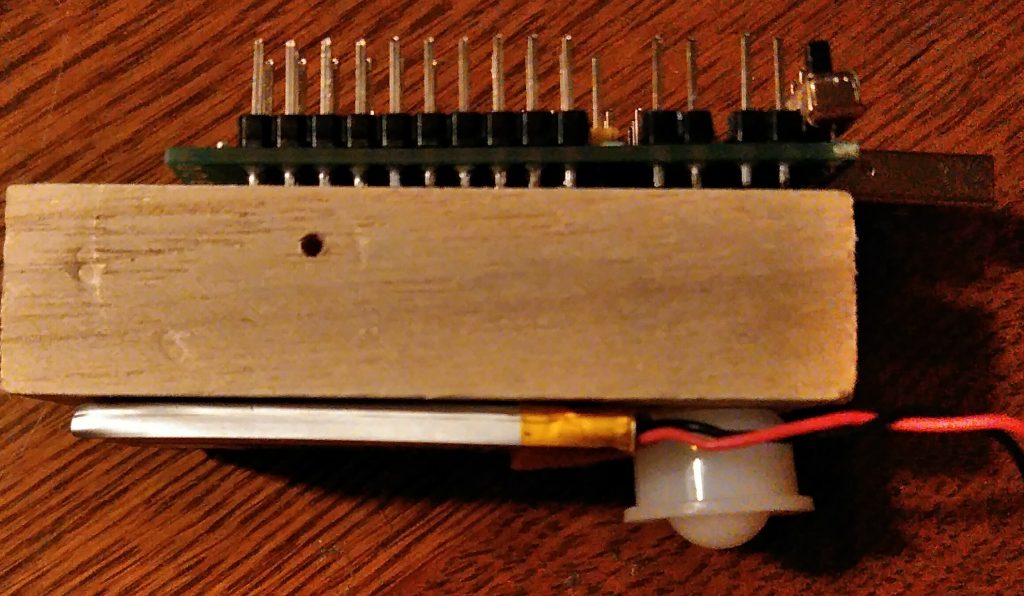
- Lipo充電池、ちびキャスターを木片に両面テープで貼り付けます。
 –
–
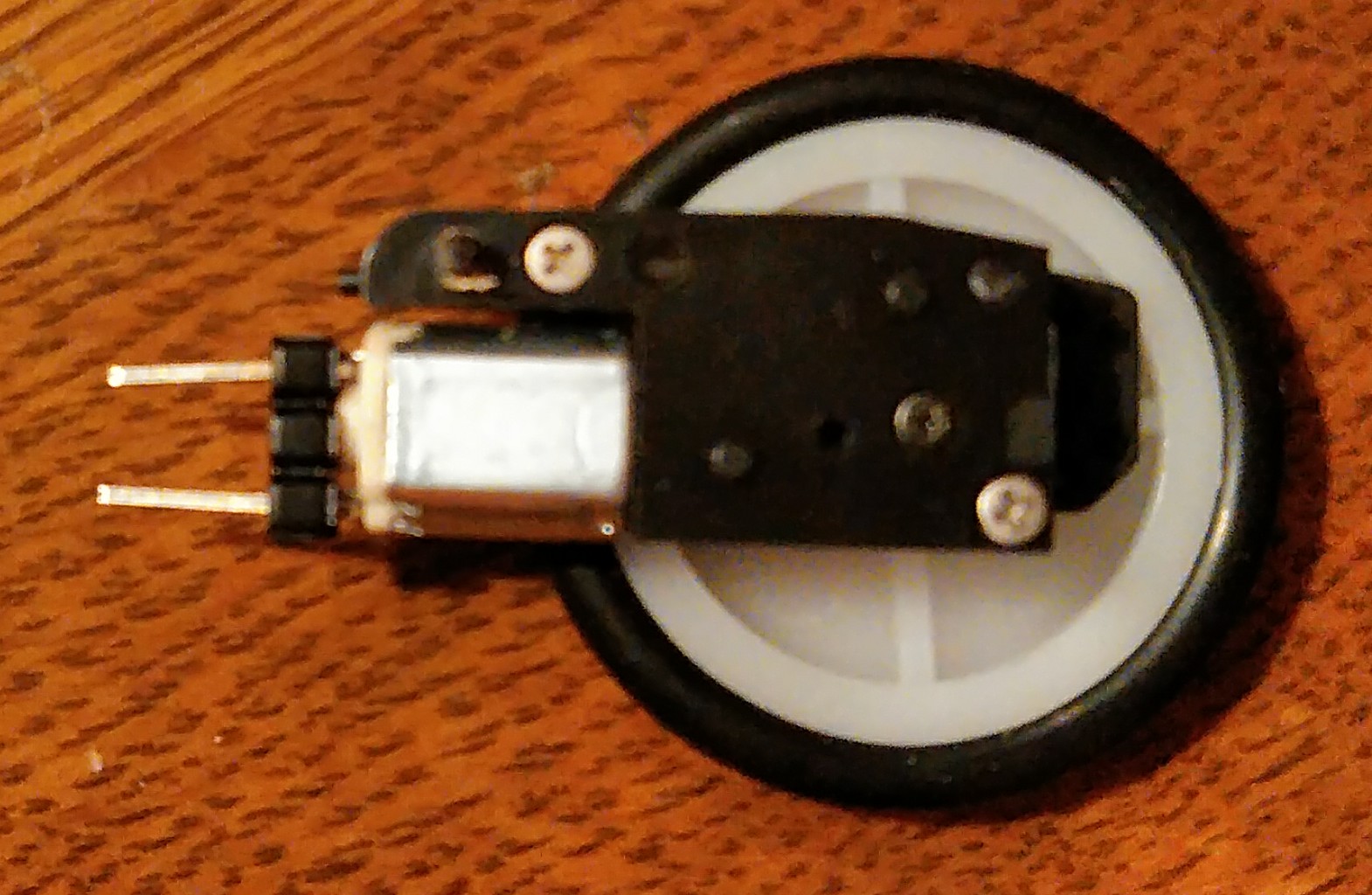
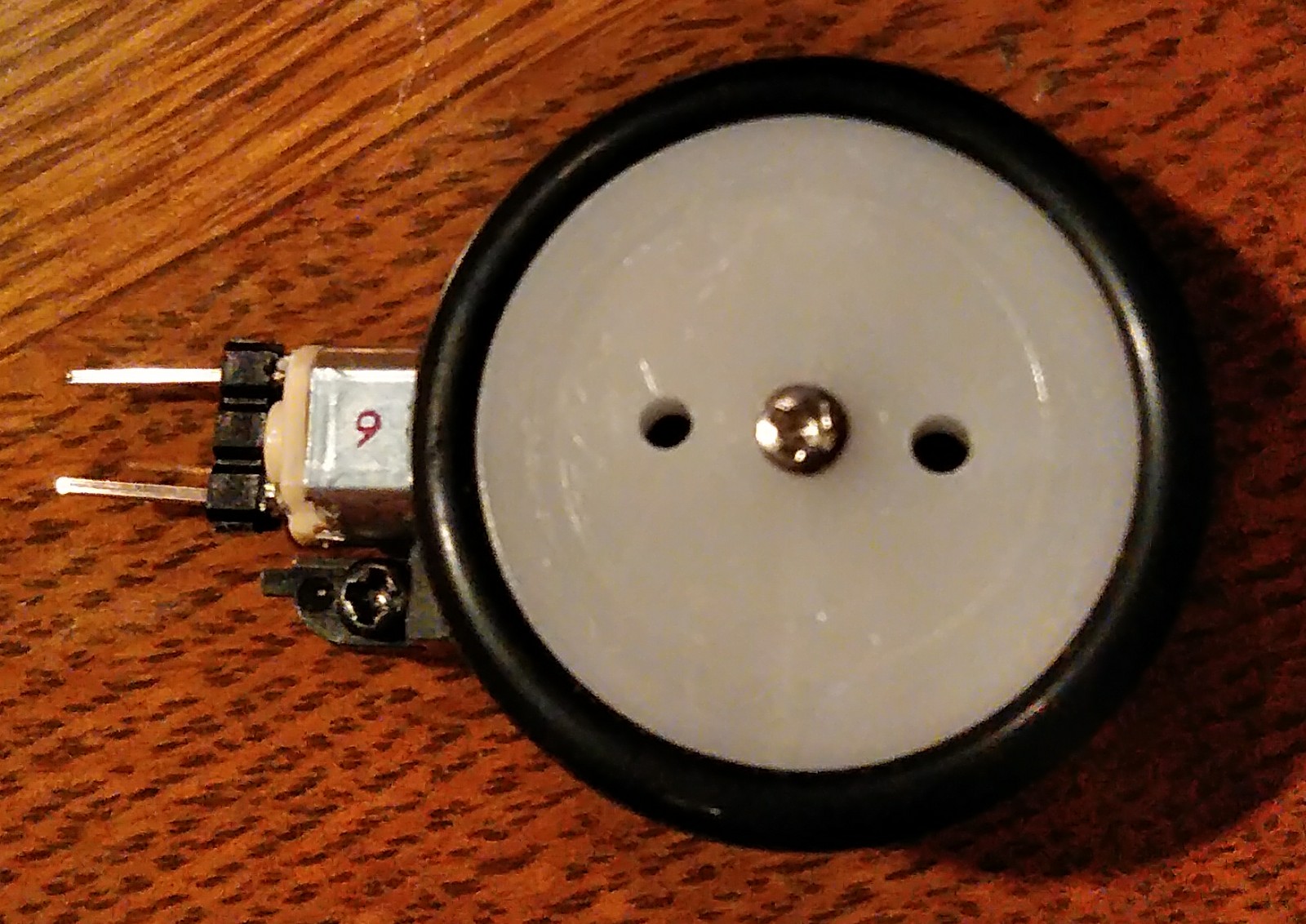
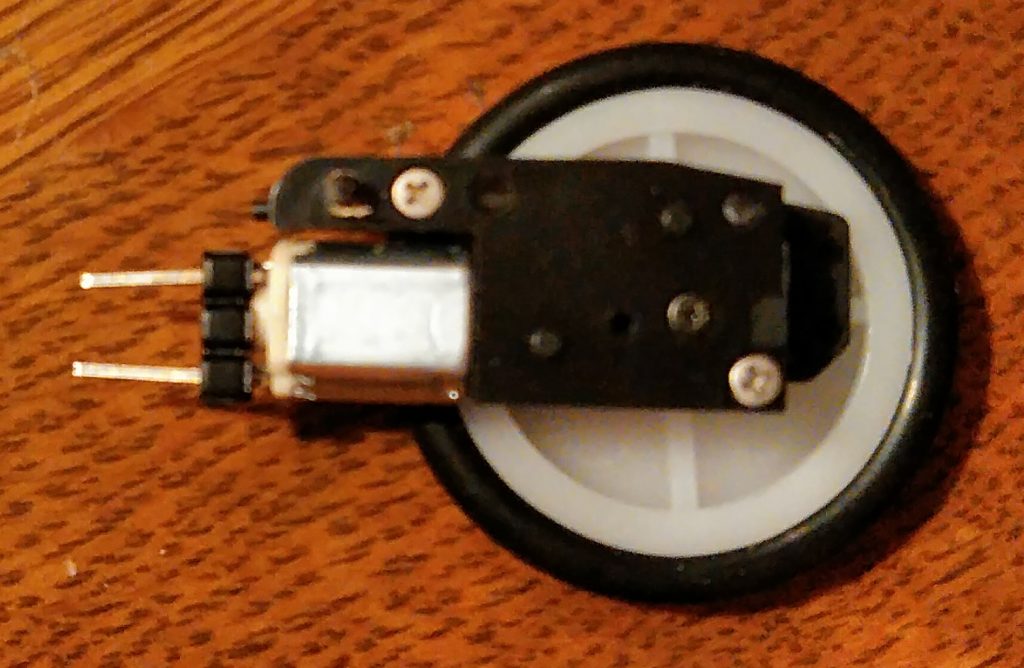
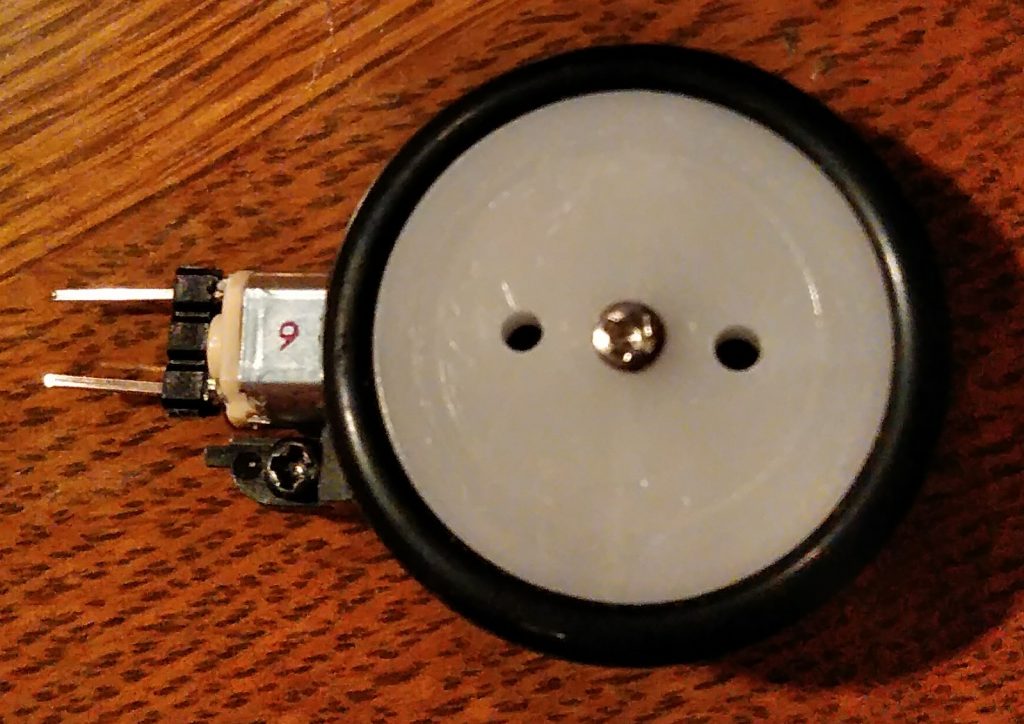
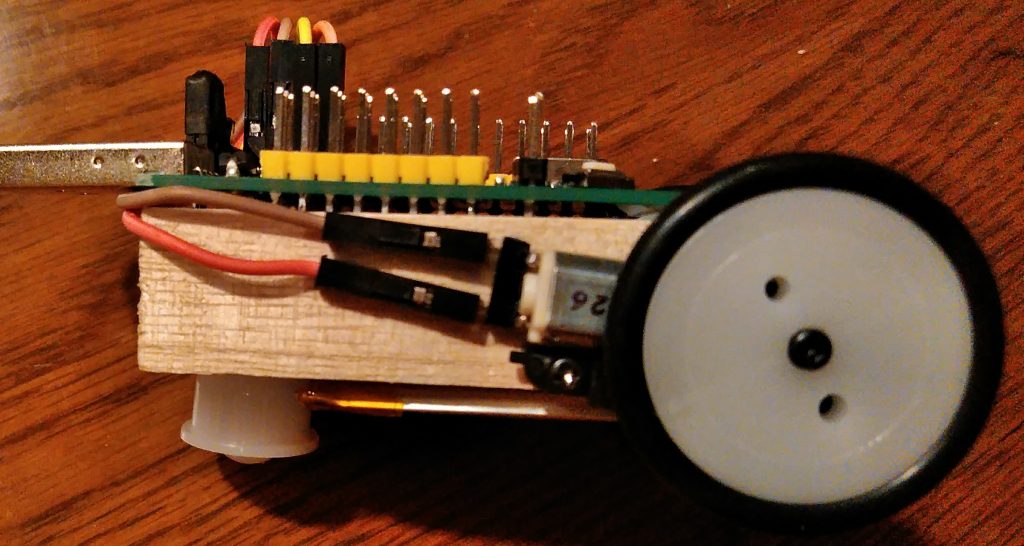
- ちびギアモーターにタイヤをビス止め(2×8mm)このリンクの組立て方を見ながら、ちびギアモーターに車輪をねじ止めします。
 –
–
- ちびギアモーターを木片に黒ねじ止め(1.7x6mm2個) タイヤの高さをキャスターに合わせ、ギアモータと木片の端を合わせます。両面テープ併用でずれにくくなります。
 –
–
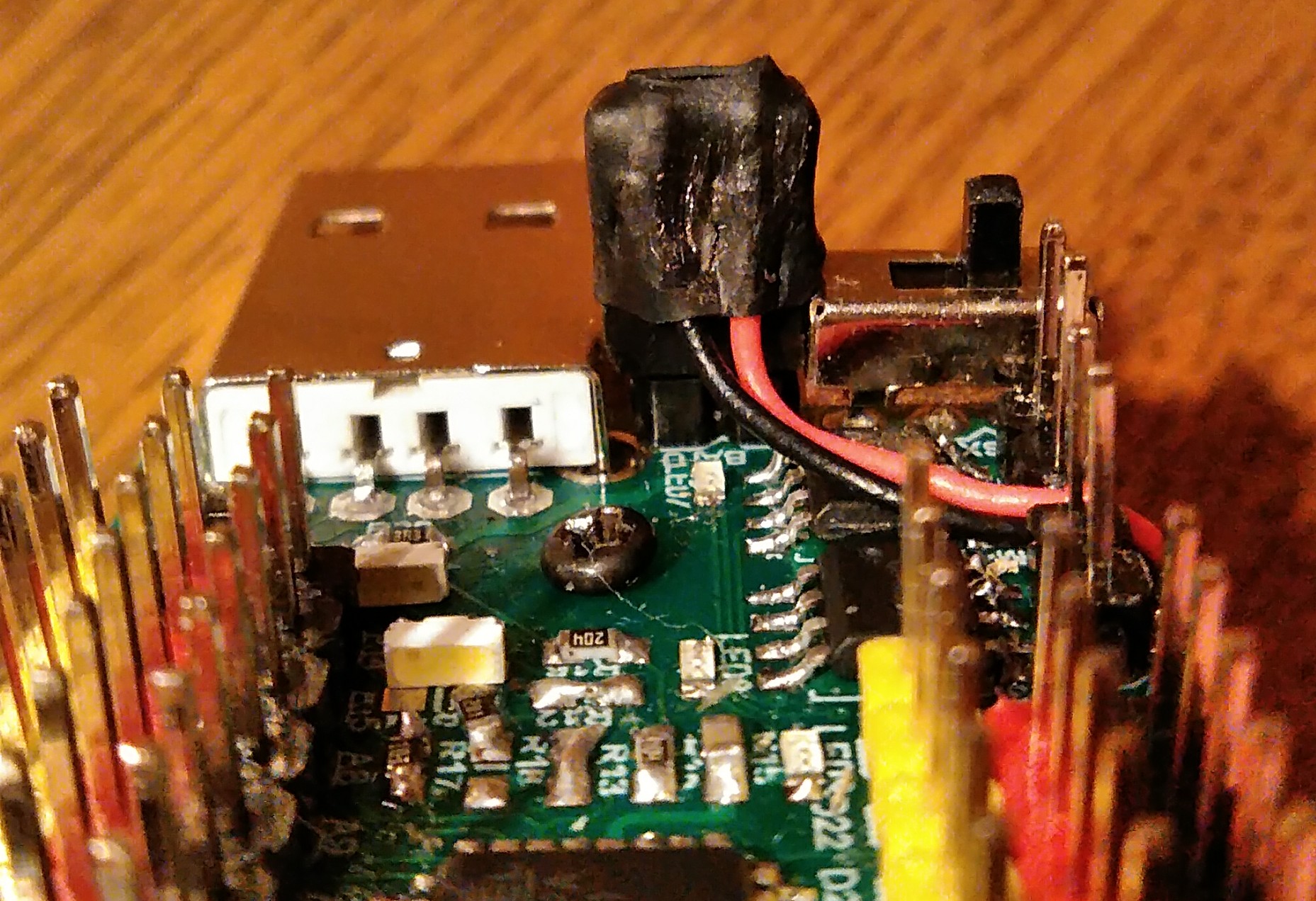
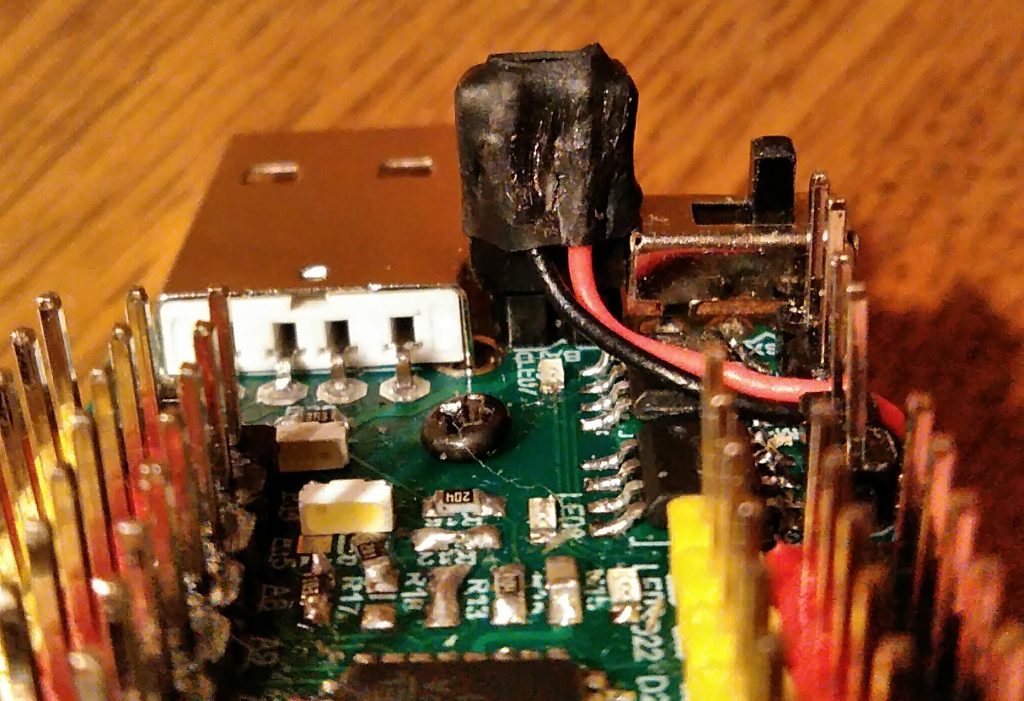
- Lipo充電池の配線 USB端子側が0V(黒線)
 –
–
- ギアモーター配線
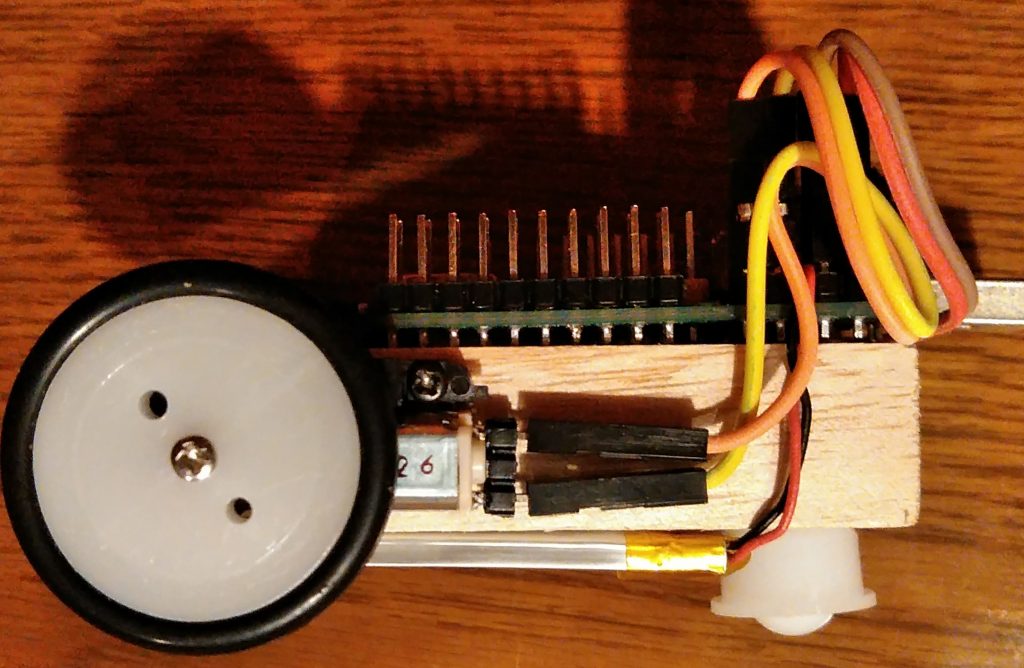
これで組立ては完成です。
使い方はこちらです
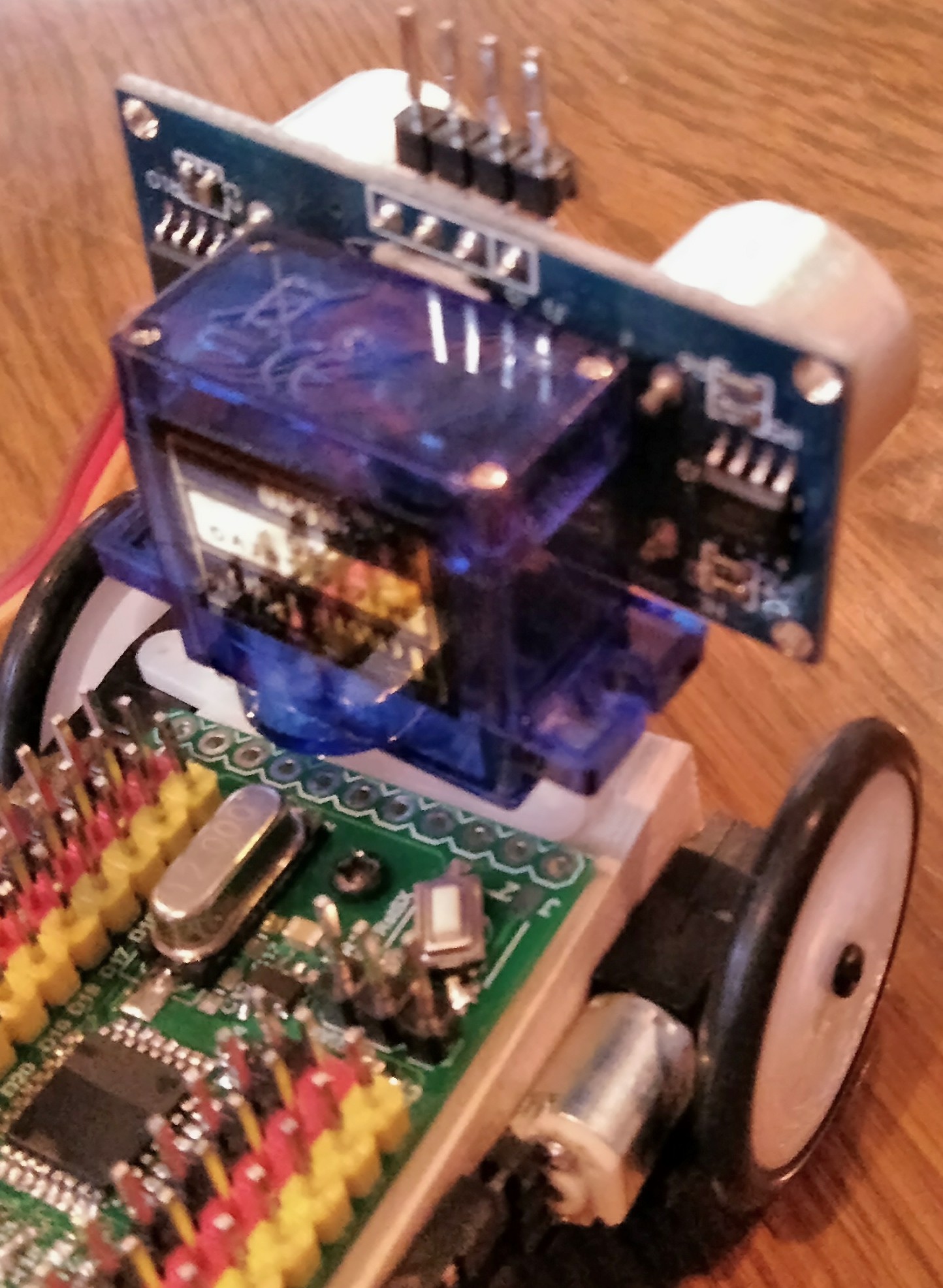
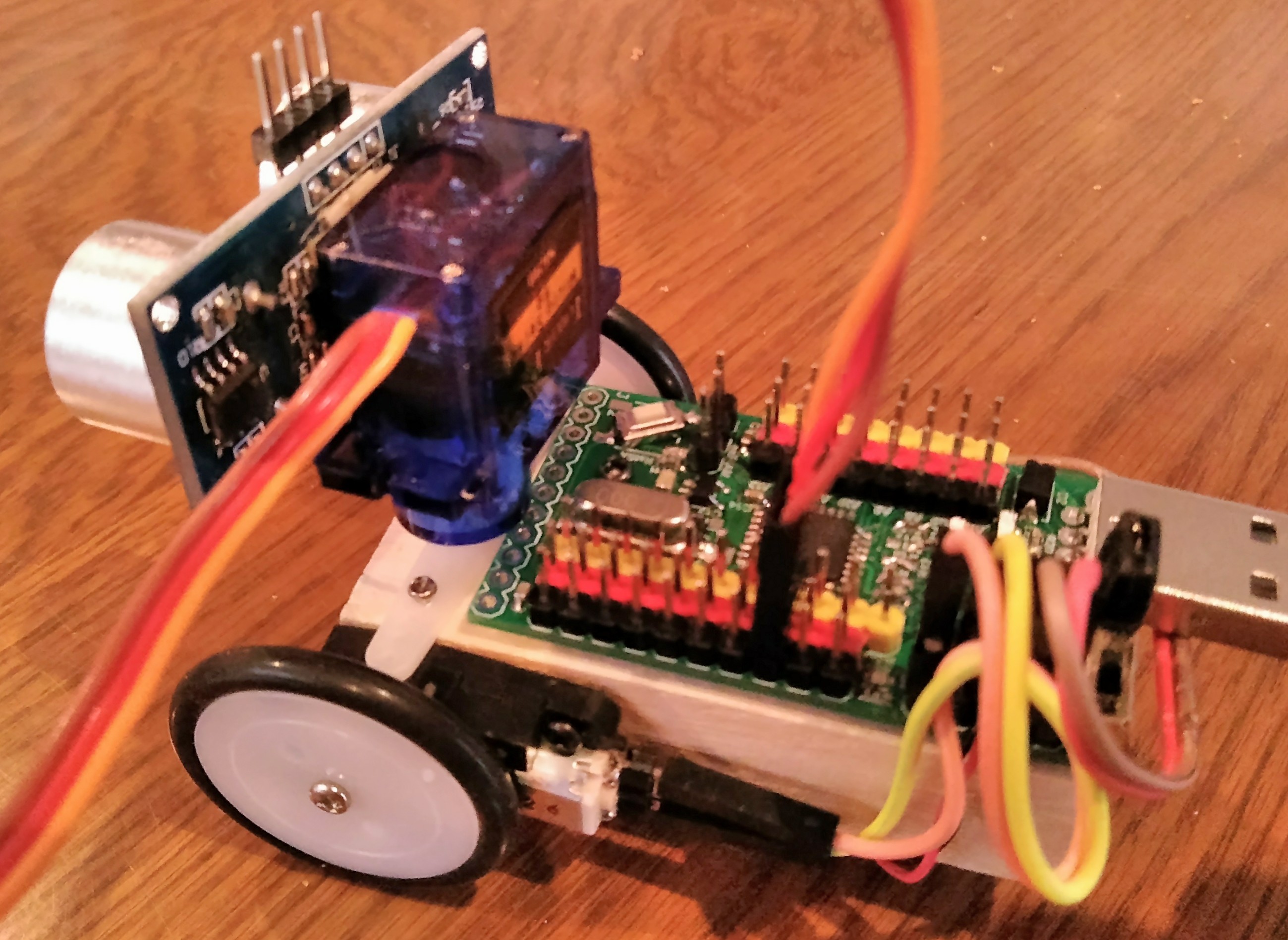
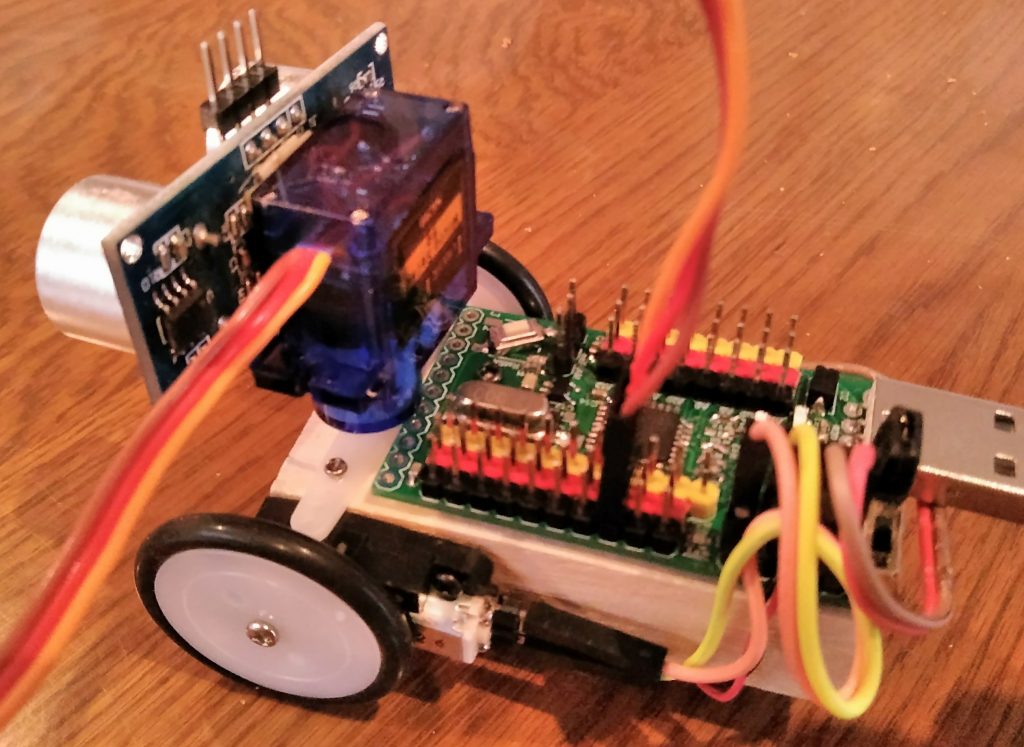
応用例として、マイクロサーボSG90に3.3V超音波距離センサーを貼り付けて、サーボホーンでボディに固定してみました。
サーボは、ArduinoのAnalogWtite()でPWM制御できます。
Ardublockではサーボのブロックが用意されています。
StuduinoBPEでは、D11端子でサーボを使うブロックが用意されています。
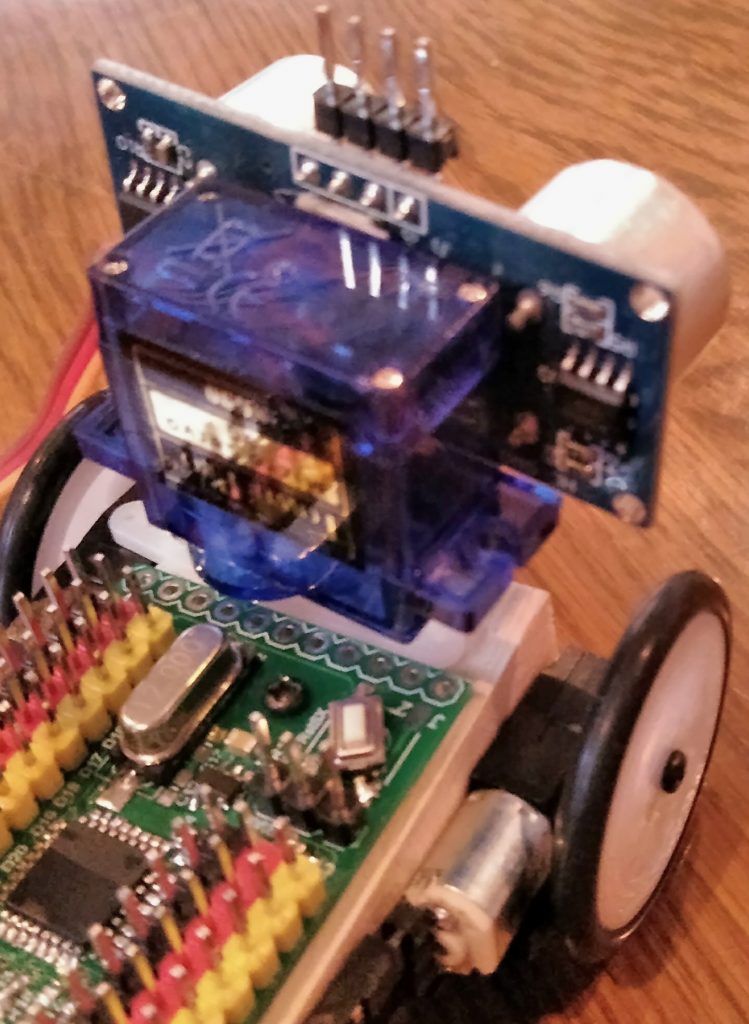
3.3V超音波距離センサーは、“HCSR04 Arduino”でライブラリを探してください。
Ardublockではgeneric hardware-超音波のブロックが用意されています。
投稿 by tomonnn1 in android, arduino, はんだづけ
5 Comments »
2019/02/11
同人ハードウエアフェス2019 久々に出展しました。

–
最近は、子供や学校向けに、使いやすい完成品ボードを低コストで作れないか試行していました。
–
その成果として「あそぼ~ど」を設計しました。

–
ロボットカーとして同人ハードウエアフェス2019にて頒布しました。
頒布したセットで不足品がありましたら、メールにてお知らせください。
投稿 by tomonnn1 in はんだづけ
2 Comments »
2018/09/14
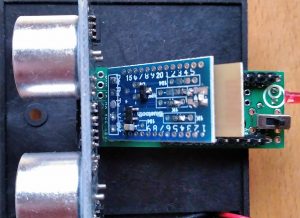
ちびか~にBluetoothモジュールを付けて、Scratchでコントロールできるようにしました。
迷路抜けロボットカー ワイヤレスちびか~ キットを2500円(送料別)で頒布します。
[内容物]
ちびでぃ~のPro(ファーム書込済ATMega8実装済、10KΩx2、0.1uF、100uF、8MHz、LED)、Bluetoothモジュール5V用、(ちびギアモーター+タイヤ)x2、超音波距離センサー、電池ボックス、電源スイッチ、ピンソケット、ピンヘッダ、取付ねじ(1.7×6 4本, 1.4×8 2本 )
(別途、単3ニッケル水素充電池4本が必要です)
–
車体の組立て
車体の電池ボックスの両脇中央に、ちびギアモーターを配置して、2輪走行します。

–
このリンクの組立て方を見ながら、ちびギアモーターに車輪をねじ止めします。
下の写真のように、1.4×8タッピングねじを電池ボックスの+極の穴に挿します。
このねじをギアモータの真ん中の取付け穴に挿して、ギアモータが固定されるまで、ねじ込みます。
もう片側のギアボックスは、上の写真のように、対照となる向きに取り付けます。

–
電池ボックスを裏返して、電池の曲面を床に接触させて走行する事で、前輪キャスターを省きました。 できるだけタイヤの高さを低くして、方向転換時のガタツキを抑えます。 平坦な所で走らせれば、すばやく走行・旋回します。

–
電池ボックスの裏側が上面になり、なのぼ~どAGやちびでぃ~の等が搭載できます。
今回は、ちびでぃ~のProを裏返しにして搭載しています。

–
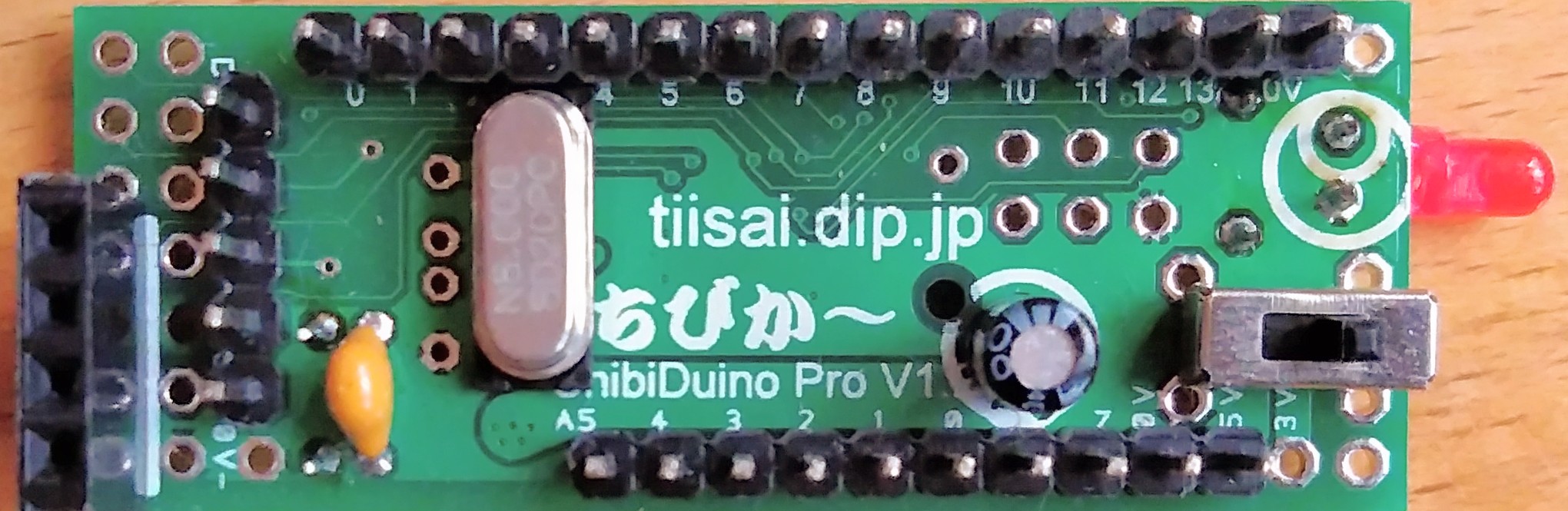
ちびでぃ~のProの抵抗やコンデンサーを下写真のように半田付けします。
10KΩ x 2, LEDは向きがあります。写真の下側が長い方のリード線(+)です。部品面の高さが低くなるように、横にして基板の端に取付けます。

.
裏面に0.1uF、100uF電解コンデンサ、 8MHzクリスタル、スライドスイッチ、ピンヘッダー、ピンソケットを取付けます。(下写真)
100uF電解コンデンサは向きがあります。写真の下側が長い方のリード線(+)です
ピンソケットをニッパーで4ピンに切り、写真のように取付けます。 5ピン目の所にニッパーの刃をあてて切ります。
同じようにピンソケットを2ピン、4ピンに切ります。後でモーターと電池ボックス配線に使います。
ピンヘッダを15ピン、10ピン、5ピンに切り、写真のように取付けます。

–
1.7×6のタッピングねじを電池ボックス側から差し込み、上記写真の、基板の1.5mm取付穴2箇所にねじ込んで固定します。

–
電池ボックスの電源線とピンソケット2ピンを写真の様にはんだ付け配線します。
端子部分をテープや熱収縮チューブ等で保護する事をお勧めします。
ちびでぃ~のProのピンヘッダに配線したピンソケットを差し込みます。
電源は、1.2Vのニッケル水素電池4本で4.8Vを供給します。 赤:5V、 黒:0V

–
モーターとピンソケット4ピンを写真の様に配線します D7,8:モーター1 D9,10:モーター2
端子部分をテープや熱収縮チューブ等で保護する事をお勧めします。
モータはATMega8に直結で駆動します。

–
はんだ付け済み版も、上写真と同様に、ピンヘッダと電源・モータ端子間を配線します。
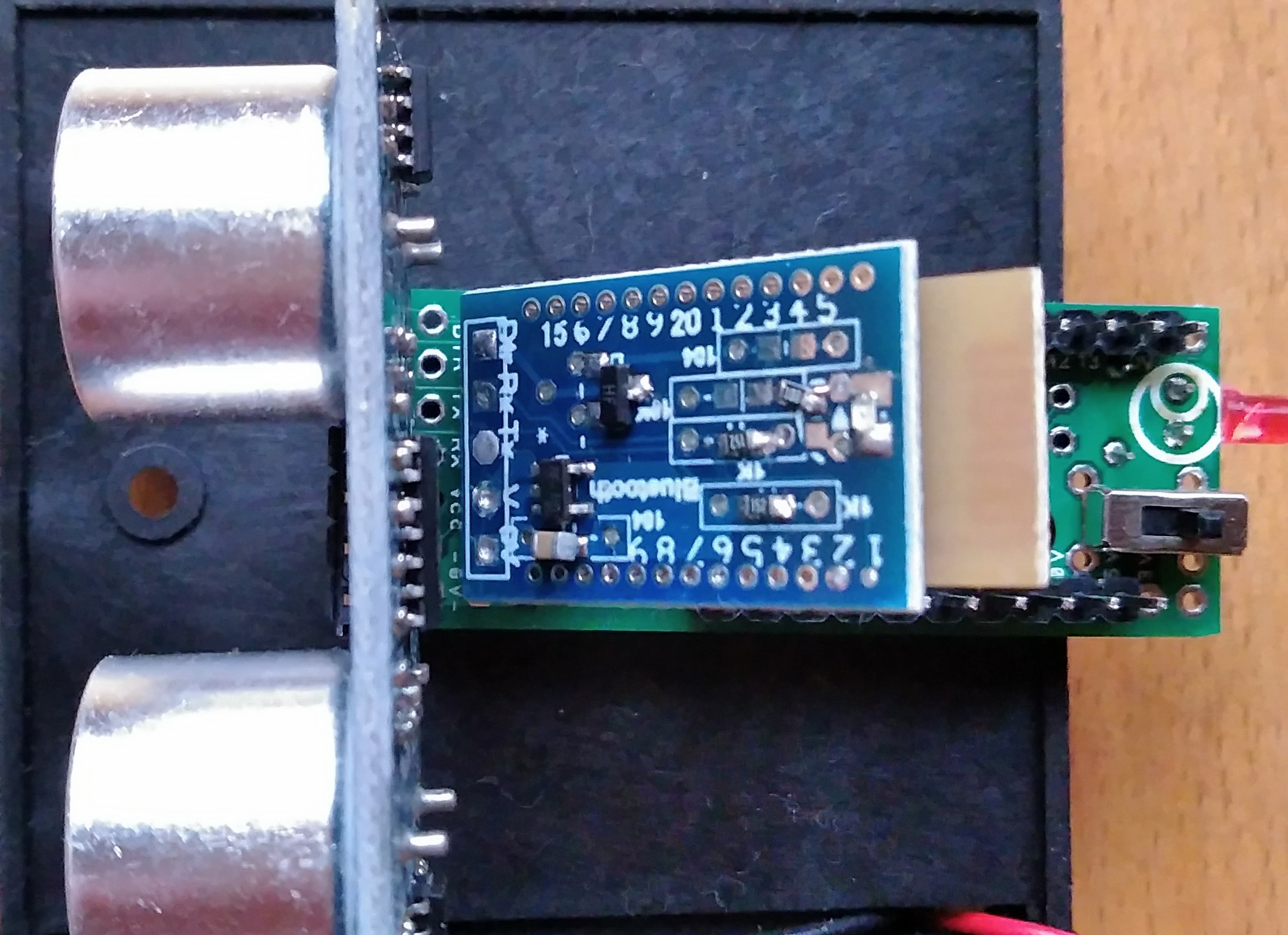
超音波距離センサーを4ピンピンソケットに差し込みます。
Bluetoothモジュールを5ピンピンヘッダに差し込みます。
これで、組み立ては完了です。
MPU ATMega8は、ヒューズ、ブートローダー、Scratch用ファームウエアが書き込まれています、
電池ボックスにニッケル水素充電池(1.2v)を4本取り付けます。
スライドスイッチを基板内側にすると電源ONとなり、LEDが2回点滅します。
なのか~と比べると、スライダ、光、音、スイッチセンサやモータパワーはありません。
なのか~と同じようにScratchから2モーターと超音波距離センサーを使ってプログラミングできます。
迷路抜けscratchプログラムはこちらです
●ワイヤレスちびか~用のArduinoスケッチはこちらです
投稿 by tomonnn1 in はんだづけ
No Comments »
2017/12/13

–
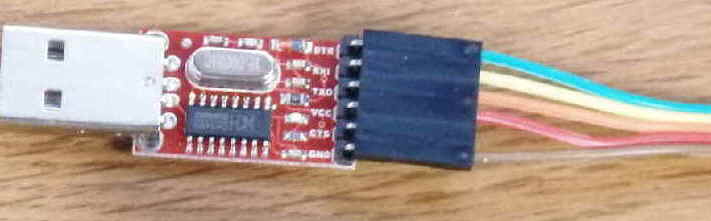
PCのUSBコネクタに直結して使いますので、USBケーブルは不要です。
端子はArduino Pro Mini ピン互換で、DTR/RX/TX/Vcc/GNDの5ピンです。
Vccには、USBから5Vが給電されます。
また両側のスルーホールからチップの制御線が全部取り出せるようになっています

–
Arduino には、5本を付属のメスメスケーブルで接続します。
Arduino IDEスケッチアップロード時のオートリセットをサポートしています。ちびでぃ~のProやArduino Pro Miniと接続して、Arduino IDEからスケッチをアップロードできます。

投稿 by tomonnn1 in はんだづけ
No Comments »
2017/04/29
ちびか~を V1.2にマイナーアップデートしました。
機能は変わっていません。電源スイッチ基板実装、部品削減、現行部品への更新を行っています。–

–
迷路抜けロボットカー ちびか~ キットを1500円(送料別)で頒布します。
障害物をよけて自立走行するロボカーの組立てキットです。 ArduinoIDEやArdublockでプログラミングできます。
ちびでぃ~のやちびギアモータの採用で、同じような製品と比べて、群を抜く低価格を実現しています。
基板のリード部品はんだ付け、モーターや電池ボックスの配線をはんだ付け、数ヵ所のねじ止めで完成します。

[内容物]
ちびでぃ~のPro(ファーム書込済ATMega8実装済、10KΩx2、0.1uF、100uF、8MHz、LED)、CH340USBシリアルモジュール+ケーブル、(ちびギアモーター+タイヤ)x2、超音波距離センサー、電池ボックス、電源スイッチ、ピンソケット、ピンヘッダ、取付ねじ(1.7×6 4本, 1.4×6 2本 )
(別途、単三ニッケル水素充電池4本が必要です)
–
車体の組立て
車体の電池ボックスの両脇中央に、ちびギアモーターを配置して、2輪走行します。
–
このリンクの組立て方を見ながら、ちびギアモーターに車輪をねじ止めします。
下の写真のように、1.4×6タッピングねじを電池ボックスの+極の穴に挿します。
このねじをギアモータの真ん中の取付け穴に挿して、ギアモータが固定されるまで、ねじ込みます。
もう片側のギアボックスは、上の写真のように、対照となる向きに取り付けます。
–
電池ボックスを裏返して、電池の曲面を床に接触させて走行する事で、前輪キャスターを省きました。 できるだけタイヤの高さを低くして、方向転換時のガタツキを抑えます。 平坦な所で走らせれば、すばやく走行・旋回します。
–
電池ボックスの裏側が上面になり、なのぼ~どAGやちびでぃ~の等が搭載できます。
今回は、ちびでぃ~のProを裏返しにして搭載しています。
–
ちびでぃ~のProの抵抗やコンデンサーを下写真のように半田付けします。
10KΩ x 2, LEDは向きがあります。写真の下側が長い方のリード線(+)です。部品面の高さが低くなるように、横にして基板の端に取付けます。
.
裏面に0.1uF、100uF電解コンデンサ、 8MHzクリスタル、スライドスイッチ、ピンヘッダー、ピンソケットを取付けます。(下写真)
100uF電解コンデンサは向きがあります。写真の下側が長い方のリード線(+)です
ピンソケットをニッパーで4ピンに切り、写真のように取付けます。 5ピン目の所にニッパーの刃をあてて切ります。
同じようにピンソケットを2ピン、4ピンに切ります。後でモーターと電池ボックス配線に使います。
ピンヘッダを15ピン、10ピン、6ピンに切り、写真のように取付けます。

–
1.7×6のタッピングねじを電池ボックス側から差し込み、上記写真の、基板の1.5mm取付穴2箇所にねじ込んで固定します。
–
電池ボックスの電源線とピンソケット2ピンを写真の様にはんだ付け配線します。
端子部分をテープや熱収縮チューブ等で保護する事をお勧めします。
ちびでぃ~のProのピンヘッダに配線したピンソケットを差し込みます。
電源は、1.2Vのニッケル水素電池4本で4.8Vを供給します。 赤:5V、 黒:0V
–
モーターとピンソケット4ピンを写真の様に配線します D7,8:モーター1 D9,10:モーター2
端子部分をテープや熱収縮チューブ等で保護する事をお勧めします。
モータはATMega8に直結で駆動します。
–
はんだ付け済み版も、上写真と同様に、ピンヘッダと電源・モータ端子間を配線します。
–超音波距離センサーを4ピンピンソケットに差し込みます。
これで、組み立ては完了です。
MPU ATMega8には、ブートローダーと迷路抜けスケッチが書き込まれています。
ニッケル水素充電池(1.2v)を4本電池ボックスに取り付けます。
スライドスイッチを基板内側にすると電源ONとなり、モーターが回ります。
距離センサーに手をかざすと、LEDが点灯して、少しバックしてから右か左に回転します。
ワイヤレスちびか~の続きは、前のページに戻って作業を続けてください。
–
以下は、ちびか~でのArdublockプログラミング方法です。
–
USBシリアルモジュールをPCに挿して、Arduinoからスケッチをアップロードする
電源スイッチを切ります。
ちびでぃ~のpro に USBシリアルモジュールのコネクタを向きを間違えないように接続します。
写真のように端から、茶色(0V)、赤(5V)、橙(RX)、黄(TX)、緑(DTR)

–
USBシリアルモジュールが赤い基板の場合は、下の写真のようにケーブルを接続します。
–
CH340USBシリアルモジュールのデバイスドライバーをPCにインストールします
ArdublockとArduinoやデバイスドライバを含めた全部入りのwindows用ファイルをダウンロードできます。任意のフォルダに解凍して、arduino.exe を実行します。
Ardublock単体をインストールする場合は、このファイルを解凍して、Arduinoフォルダの tools\ArduBlockTool\tool フォルダに置いてください。インストール例はこちらです。
Arduinoの Tools – board プルダウンメニューから”chibiDuino pro ATmega8 38400 optiboot”を選択し、Tools – portで、USB接続したポート名を選択します。
これでスケッチのアップロードができるようになります。
Arduinoの Tools –プルダウンメニューを開くと、 ArduBlockが追加されていますので、これをクリックします。
ちびか~に出荷時に書き込まれている、Ardublockの迷路抜けスケッチは TIBIMO3.abp です。
Ardublock画面からloadボタンを押してこのファイルを読み込んでから、uploadボタンを押してちびか~のプログラミングができます。
以下の手順で、自分でプログラミングしてみましょう
・前後左右、停止のサブルーチン
・距離センサーが5cmになるまで前進
・距離が距離センサーが5cmになったら停止して、少し後退
・右か左を向く
ー

ー
__________________________________________________
__________________________________________________
投稿 by tomonnn1 in arduino, はんだづけ
5 Comments »
2015/12/09
最近流行っている、激安中華WifiモジュールESP8266にモータードライバーを載せた基板を友達から分けてもらったので、この基板を使ったロボットカーをArduinoIDEでScratch遠隔センサープロトコルを実装して、Scratchからリモコンしてみました。

–
Scratchから操縦している動画はこちら Wifi scratch car with ESP8266 arduino–
–
–
基板には、Wifiモジュール ESP-WROOM2(ESP8266の日本向けモジュール) 、モータードライバー、電源レギュレーターが載っています。
基板に、ちびギアモーターとLipo充電池をつないで、LEGOのフレームに収めてみました。

–
ESP8266内臓の32bitMPUは、Arduinoでコーディングする環境が提供されているので、
ArduinoIDEでScratch遠隔センサープロトコルを記述してみました。
今回は、WifiルーターへのログインやScratchPCのIPアドレスは、コードに直接記述しています。

–
Scratchから送るメッセージ、M1F(Motor1 Forward), M1B(Motor1 Back)、M2F(Motor2 Forward), M2B(Motor2 Back)でモータをコントロールするようにしてみました。
今回はモーターパワーの制御まで出来ませんでしたが、グローバル変数を使って値をやり取りすれば実装できます。

–
WIfiはBluetoothと較べて消費電力が大きいので、電源容量が多くなり、ロボットも大きくなってしまい、コストも高めになりますが、通信相手の自由度が増すのが利点かなと思っています。
これから、頒布できるように完成度を上げていこうかなと考えています
–
__________________________________________________
投稿 by tomonnn1 in はんだづけ
3 Comments »
2015/08/21

なのぼ~どAG をV1.4にアップデートしました。
表面実装やデザインを見直し、円安によるコストアップに対応し、
まとめていただくと、よりお求め安くなります。
–
裏面のロゴや文字を大きくデザインしました。

–
●なのか~等での電池動作時の利便性向上
・電源電圧を 3V~5V に拡張
従来の5V電源から、最低3Vまで動作電圧範囲が広がりました。
乾電池2~3本やニッケル水素充電3~4本、Lipo1セルなどのバリエーションで使えます。
また、電源スイッチOFF時にUSB給電でLipoの充電を行います。
充電リミット機能のあるLipo電池(こちらで頒布中)を使い、満充電時にLEDが点灯します。
–
・8MHz水晶発振子を追加し、動作クロック安定化
電源電圧や動作温度に依存せず、arduinoIDEでスケッチアップロード安定化
–
・USBシリアルチップにPL2303HXCを採用し、水晶発振子削減
Windows7以降では、デバイスドライバーが自動インストールされます。
–
・電池接続用電源スイッチの取付パターン追加
なのか~キットには、電源スイッチが実装されています。
なのぼ~どAGには含まれません。オプションの電源スイッチは、10円で頒布します。

–
・USB接続給電(5V)と電池給電(3V)をショートピンで切替
USB接続時には、写真のようにBluetoothモジュール端子にショートピンを2箇所挿します。 このとき、USBからの5Vが給電されます。

電池給電時には、上記2箇所のショートピンをはずします。紛失しないよう、ピンを片側だけ挿しておくといいです。
–
●外部入力端子の拡張性アップ
・超音波距離センサーのサポート
抵抗A端子を含む4ピン端子に超音波距離センサーを挿せば、
動作モード2で抵抗Aの値として距離値(Cm)が読み取れます。

–
・抵抗A~Dの10Kオームプルアップ抵抗の切離し(P1~P4)
人体接触などの高抵抗の検出したい場合に、P1~P4をカッターで切離して、プルアップ抵抗を切離せます。
–
・内臓センサーの切離し(A1~A6)
外部に多数のセンサーを追加する際にA1~A6をカッターで切離して、なのぼ~どAGの内部センサーを切離せます。
__________________________________________________
投稿 by tomonnn1 in はんだづけ
18 Comments »
2015/08/10
8/1,2に開催された、Maker Faire Tokyo 2015に出展しました(紹介記事)。
会場の様子はこちら

–
MFT2015に合わせて、れごも をなんとかリリースできました。
LEGO師匠にお願いして、LEGOとの組合せ例も展示できました。
たくさんの子供や大人に遊んでいただき、頒布分も完売でした。
Andriodの会ロボット部の方々にもご協力いただき、ありがとうございました。

__________________________________________________
投稿 by tomonnn1 in はんだづけ
No Comments »
2015/08/07
ちっちゃいモーターブロック れごも を MFT2015でリリースしました

–
LEGOで組んだメカに れごもをエンジンとして載せて、スマホリモコンで操縦できます。

–
れごも は、AndriodスマホアプリからBluetooth経由で2モーターと3LEDをコントロールします。
2×4ポッチLEGOブロックのフレームにちびギアモータ、コントローラー、Lipo充電池を詰め込みました。
–
れごもキット を2000円で頒布中
小型化のため、表面実装など上級向けです。作り方を見て作れそうか判断お願いします。
れごも表面実装済キット を3500円で頒布中
本Bluetoothモジュールは海外用です。国内では電波障害を起さない環境で使用願います。
–
●使い方–
スイッチONの瞬間に全てのLEDが一瞬点滅します。
Lipoの充電は、スイッチOFFの状態でマイクロUSBケーブルから5Vを給電します。

充電電流は最大160mA程度、30分ぐらいで充電完了すると、3つのチップLEDが点灯します。充電完了するとLipo内臓のコントローラチップが電池を回路から切り離し、過充電から保護されます。
Lipo内臓の保護回路についてはこちらをどうそ。
Andriodのリモコンアプリは,LEGOMO.APKをダウンロード、解凍、インストールします。
遊び方は、ぴこか~のページの末尾を参照してください。
–
●Andriodのリモコンアプリを公開します。
アプリはApp Inventor 2で書きました。Scratchのようにブロックを積んでAndriodアプリが書けます。
App Inventor 2にimportできるプロジェクトファイルLEGOMOSRCはこちらです。

–
–
●回路図

__________________________________________________
投稿 by tomonnn1 in はんだづけ
2 Comments »
2015/05/17
ちびか~にBluetoothモジュールを載せて、なのぼ~どのスケッチを書込みました。
ワイヤレスArduinoとしても使えます。
.
現在MACとWindows10で、Bluetooth SPP通信のCOMポートに接続できない問題が確認されています。Windows7/8.1/10でご利用ください。 Windows10は最新版で動作確認しています。

Arduino+ 超音波距離センサ+ Bluetooth+ 2モータカー
・なのぼ~どの代りに、ちびでぃ~のpro を使ってコストダウン
・スライダ、光、音、スイッチセンサやモータパワーを省略
・単三充電池4本で動きます。
.
●作り方は、こちらを参照ください。
.
●使い方は、なのか~ と同じです
スライダ、光、音、スイッチセンサやモータパワーは、ありません。
なのか~と同じようにScratchから2モーターと超音波距離センサーを使ってプログラミングできます。
迷路抜けscratchプログラムはこちらです
●ワイヤレスちびか~用のArduinoスケッチはこちらです
.
__________________________________________________
投稿 by tomonnn1 in Scratch, はんだづけ
16 Comments »
2015/05/16
●なのか~の電源を入れて、Bluetoothのペアリングを行います。
デバイスの追加で、デバイスを検索して、

BTCOMデバイスを追加します。

パスコード”1234″を入力すると、デバイスドライバーがインストールされます。

“コントロール パネル\ハードウェアとサウンド\デバイスとプリンター”に”BTCOM”が追加されたら、クリックしてプロパティのハードウエアタブでCOM番号を確認します。
この COM番号を使ってScratchと接続しますのでメモしておきましょう。

.
●なのぼ~どAG用Scratchの起動
Scratchを展開したフォルダーにある、NanoBoardAGWithMotors.imageをダブルクリックするとNanoBoardAG 2モーター用のScratchが起動します。
(1モーター用Scratchの場合は、NanoBoardAGWithMotor.imageです)
起動できない場合は、NanoBoardAGWithMotors.imageをScratch.exeにドラァグするか、右クリックでプログラムから起動でScratch.exeを選択します。
左上のロゴが「Based on Scratch」となっていることを確認してください。
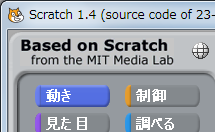
もし表示が日本語になっていない場合は、その右にある地球儀のアイコンをクリックして「日本語」を選択してください。
.
・なのぼ~どAGとScratchの接続
「調べる」の下方の「スライダーセンサーの値」ブロックを右クリックして、「ScratchBoard監視板を表示」を左クリック

.
監視板が表示されたら、監視板を右クリック→「シリアルかUSBのポートを選択」

.
あらかじめ確認しておいたBluetoothモジュールのCOM番号を選択

.
なのぼ~どAGが接続されると、なのぼ~どAG基板のランプが点灯してBluetoothモジュールの接続待ランプが消え、監視板が入って数字が変化します。

なのか~では、抵抗Aは超音波距離センサーで計測された壁までの距離(㎝)です。
.
動きのブロックの下方にモーター用のブロックが出てきます。

モーターは、小さな黒三角をクリックして、2つ一緒か、どちらか一方の操作を選択できます。

.
●簡単なスケッチを試してみましょう
スペースキーを押すと、なのか~が走ります。

・スケッチを改造して、なのか~のリモコンを作ってみよう
抵抗Aセンサーは超音波距離センサーで計測された壁までの距離です
・壁にぶつかりそうになったら、自動的にストップするように改造してみよう
・自動的に迷路をぬけるプログラムを作ってみよう
.
遊んだ後は、なのか~の電源を切る前にScratchを終了します。
Scratchの動作中に、なのか~の電源を切るとBluetooth通信が中断されるため
Scratchの操作ができなくなる場合があります。その際には、Scratchのウインドウを強制的に終了してください。
迷路抜けscratchプログラム例はこちらです
.
__________________________________________________
投稿 by tomonnn1 in はんだづけ
7 Comments »
2015/05/11
Scratch1.4のプログラミングでリモートコントロールできるマイコンカー
Scratchセンサーボード なのぼ~どAG完成品にBluetoothを搭載。 なのぼ~どAGのセンサー(音、光、スライダー、押しボタン)と超音波距離センサをScratchプログラムで読んで、2つのモーターを駆動できます。
超音波距離センサーで壁までの距離を測って、迷路抜け等をプログラミングできます
現在のWindows10で、動作するようになっています。Windows7/8.1/10でご利用ください
.
ギアモーターと電池ボックスの配線をはんだ付け、数ヵ所のねじ止めで完成します。
[キット内容物]
なのぼ~どAG(完成品、電源スイッチ追加済)、超音波距離センサー、
(ちびギアモーター+タイヤ)x2、電池ボックス、Bluetoothモジュール、ピンソケット、取付ねじ(1.7x6mm 2本, 1.4x8mm 2本,2x6mmビス 2本,2x6mm皿ビス, 2mmナット) 別途、単3 ニッケル水素充電池3本が必要です

.
ギアモーターと電池ボックスの端子をはんだ済、ケーブル差し込みと数ヵ所のねじ止めで完成します。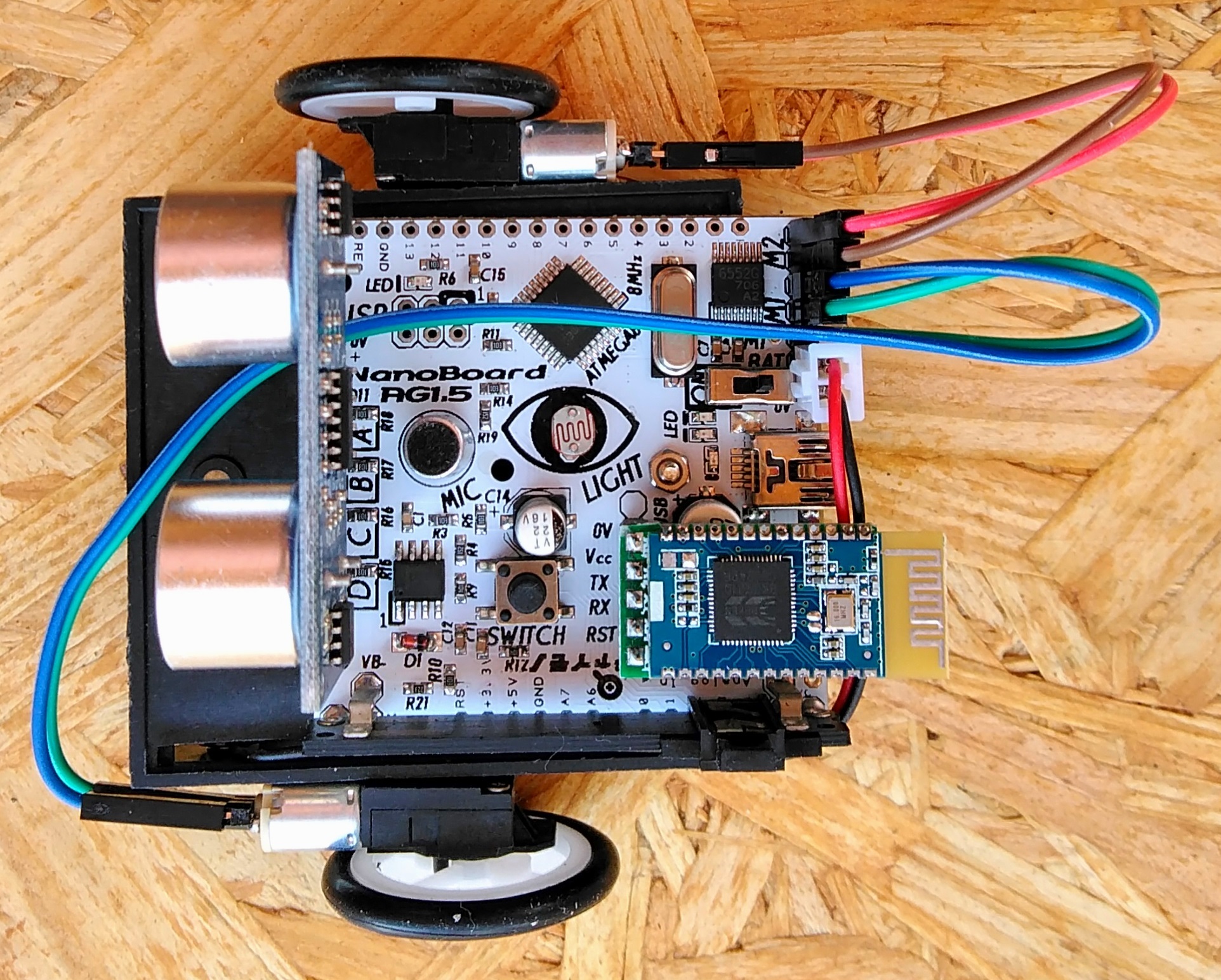
.
[はんだ済キット内容物]
なのぼ~どAG(完成品、電源スイッチ追加済)、超音波距離センサー、
(はんだ済ちびギアモーター+タイヤ)x2、はんだ済電池ボックス、Bluetoothモジュール、モーターケーブル4本、取付ねじ(1.7x6mm 2本, 1.4x8mm 2本,2x6mmビス 2本,2x6mm皿ビス, 2mmナット) 別途、単3 ニッケル水素充電池3本が必要です

.
[配線] *はんだ済キットでは、モーターケーブルと電源ケーブルを端子を差し込むだけです。
下の写真の様に電池ボックスの赤黒ビニール線を切り分けます。
短いモーター線、長いモーター線、電池ボックス線
残りの黒線を電池ボックスのバイパスに使います。

ビニール線の両端は3mmむいてハンダめっきします。
モーターや7pinピンソケットの端子もハンダめっきしておきます。
下の写真の様に配線をハンダ付けします。
ピンソケット端子に熱収縮チューブを被せると頑丈になります。

–
下の写真のように、電池ボックスの端子に黒ビニール線をはんだづけします。
端子の先端にはんだづけした電池(上から3番目)はショートされてますので、電池を入れないでください。(充電池は3本使います)
–
[車体の組立て]
車体の電池ボックスの両脇中央に、ちびギアモーターを配置して、2輪走行します。

.
このリンクを参照して、ちびギアモーターに車輪をねじ止めします。
1.4×8タッピングねじを電池ボックスの+極の穴に挿します。
ギアモータの真ん中の取り付け穴に挿して、ギアモータが固定されるまで、ねじ込みます。
もう片側のギアボックスは、上の写真のように、対照となる向きに取り付けます。
–
電池ボックスを裏返して、電池の曲面を床に接触させて走行する事で、前輪キャスターを省きました。 できるだけタイヤの高さを低くして、方向転換時のガタツキを抑えます。 平坦な所で走らせれば、すばやく走行/旋回できます。

下の写真の様に電池ボックスに、なのぼ~どAGを取り付けます。皿ねじを電池ボックス側から差込み、基板側からナットで固定します。
7pinピンソケットを基板のピンヘッダに挿します。向きは、電池ケーブルが内側(スイッチ側)になります。向きを間違えないように印をつけておくと安全です。
.
超音波センサーとBluetoothモジュールを下の写真の様に取り付けます。
超音波センサーは、基板のはじっこに取り付けます。
はんだ済キットの場合
.
なのか~の使い方
単3 ニッケル水素充電池3本を電池ボックスに入れます。
乾電池は1.5Vなので使えません。必ず1.2Vの充電池を使ってください
端子先端にハンダ付けしてある箇所には電池を入れないでください。配線でショートしてあるので電池を入れると発熱して危険です。

.
電源スイッチをいれて、Bluetooth状態ランプが点灯する事を確認してください。

これで組立ては完成です。
次はなのか~ の使い方を見てください
.
__________________________________________________
投稿 by tomonnn1 in arduino, Scratch, はんだづけ
59 Comments »
2015/03/02
USBシリアルモジュールを CH340チップに変更しましたが、
3V電源を供給したい、Androidに繋ぎたいという要望があり、
PL2303のUSBシリアルモジュールも継続する事にしました。
従来同様のキットタイプとケーブル付完成品タイプを頒布いたします。
チップは水晶が不要なPL2303HXCに変更しました。PL2303HXDと同じ最新デバイスドライバーで動作します。
Windows7, 8.1では、デバイスドライバーはネット経由でMSサイトから自動インストールされます。
他のOSでは、Prolificサイトからダウンロード、インストールします。
ー
●PL2303HXC USBシリアルモジュールキット(送料別)300円
(PL2303HXC,基板,0.1uFx2,1.5K,USB miniBコネクタ) 別途,USB mini-Bケーブルと6Pinコネクタが必要です。
頒布ご希望の方は、こちらの申し込み方法でお願いいたします
–
・表面実装は、USBコネクタ、PL2303HXC、抵抗、コンデンサの順番での半田付けします。
・USBコネクタのピンは間隔が狭いので、フラックス多め、半田を少なめに。
・PL2303HXCはUSBコネクタとの間隔が狭いので、外側に寄せて取り付けると、こて先が入りやすいです。


・Arduino pro miniと直接つながるコネクタ配列です。(DTR, Rx, Tx, Vcc, CTS, GND)
・3ピンジャンパーでVccを5V-3V切替えられます。 3V は100mAまで供給できます。
出荷時は5V設定になっています、3V切替えを行う場合には、ジャンパーをパターンカットしてからつなぎ変えます。
–
●PL2303HXC USBシリアルモジュール 1mケーブル付完成品(送料別)450円
USBコネクタ部分に基板が入っています。ケーブルは3線、長さ1mの先バラです。
頒布ご希望の方は、こちらの申し込み方法でお願いいたします

–
USBコネクタ部分は ロックされていないので、端の方をマイナスドライバーなどで均等にこじれば簡単に開きます。

–
基板からの信号は、
部品面: Tx, DTR, RTS, Rx, CTS

–
裏面: 5V, DSR, RI, 3V(100mAまで), GND

必要な信号を配線してください。
添付のケーブルは3線なので、Rx, Tx, GND等に接続しなおして利用できます。
Arduinoに接続する場合は、別途5線ケーブルを用意して接続します。
–
__________________________________________________
投稿 by tomonnn1 in はんだづけ
1 Comment »
2014/12/27
円安で、国内のAVRチップ価格も上昇し続けています。
巷では安い事で人気の有ったATTINY2313が新入荷分からATMEGAの在庫品より高くなったりしています。
そこで、円高時代に入手したATMEGAチップの在庫分を頒布する事にしました。
ATMEGAは、アナログ入力もありフラッシュサイズも大きいので、TINY2313より広範囲に使えます

–
ATMEGA8L-PU DIP28 14個で 1400円 (一個当たり100円)
ATMEGA88V-10AU TQFP32 10個で 1200円 (一個当たり120円)
ATMEGA88-20AU TQFP32 10個で 1300円 (一個当たり130円)
ATMEGA128-16AU TQFP64 1個 300円
いずれも送料別の価格です。
頒布ご希望の方は、こちらの申し込み方法でお願いいたします
チップのロット番号は写真の様になっており、製造年は最初の2桁でわかります。
–
__________________________________________________
投稿 by tomonnn1 in AVR, はんだづけ
No Comments »
次ページへ »